3.5 常用电机驱动芯片介绍
实际应用时,用分立器件制作H桥式直流电机驱动电路比较麻烦,例如,控制不好易烧毁、需加入保护电路等。目前市面上有很多封装好的H桥集成电路,接上电源后,电机和控制信号就可以使用了,在额定的电压和电流范围内使用非常方便可靠,例如:L293D、L298N、TA7257P、SN754410等,本书将重点介绍常用的L298N电机驱动芯片。
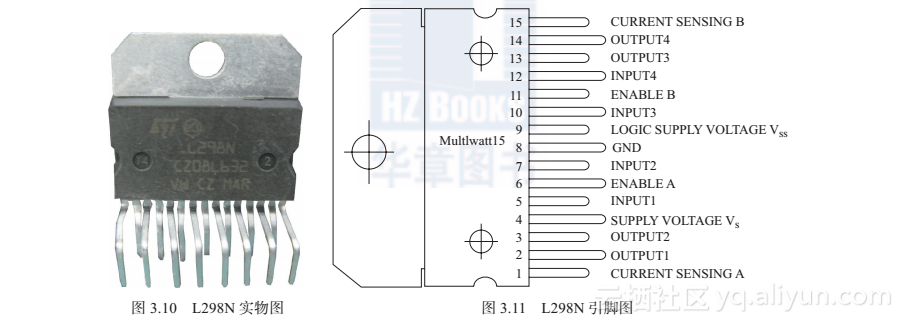
L298N是ST公司的产品,如图3.10所示,采用15脚Multiwatt封装,内部包含4通道逻辑驱动电路。L298N芯片可以同时驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压,并可以直接用Arduino的I/O接口来控制。
L298N支持标准TTL逻辑电平信号VSS,VSS可接4.5~7V电压。图3.11为L298N的引脚图,引脚4 VS接电源电压,VS电压范围为+2.5~46V,输出电流可达2.5A,可驱动电感性负载;引脚1和引脚15分别对地接一电阻,下拉的驱动电流将通过这个电阻,当电流过大时电阻上的压降也变大,下拉驱动管的射极电位将被抬高,使下拉驱动管趋于截止,起到过电流保护的作用。
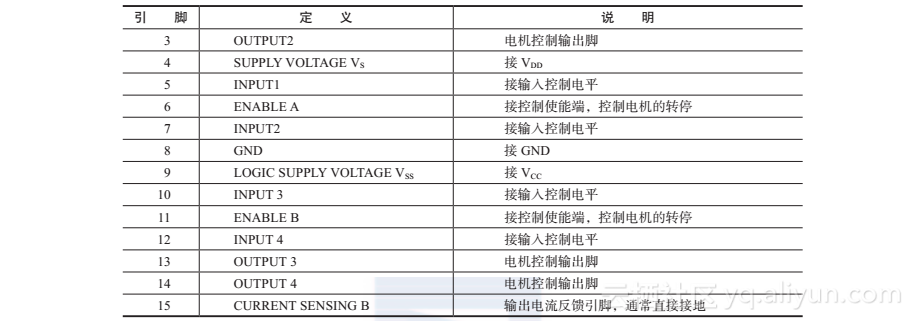
L298N驱动两个直流电机时,引脚2、3、13、14可分别接电动机;引脚5、7、10、12接输入控制电平,控制电机的正、反转;引脚6、11接控制使能端,分别控制2路电机的启动与停止。L298N芯片的引脚定义如表3-1所示。
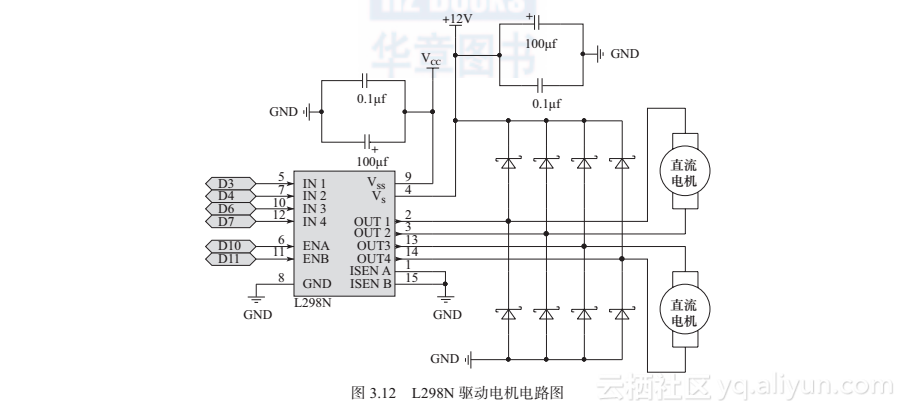
采用Arduino控制L298N驱动电机的电路如图3.12所示,利用Arduino的数字引脚(如:D3、D4、D6、D7)来分别控制2个直流电机的正、反转,同时利用PWM输出口(如:D10、D11) 来分别控制2个电机的转速。此外,L298N连接电机的输出引脚上(引脚2、3、13、14)接了8个快恢复肖特基二极管,二极管通常采用1N5819,大电流时可采用1N5822,贴片采用SS40等,接二极管主要起到为电感性负载(如电机线圈)续流通路的作用,能有效的保护芯片。