背景
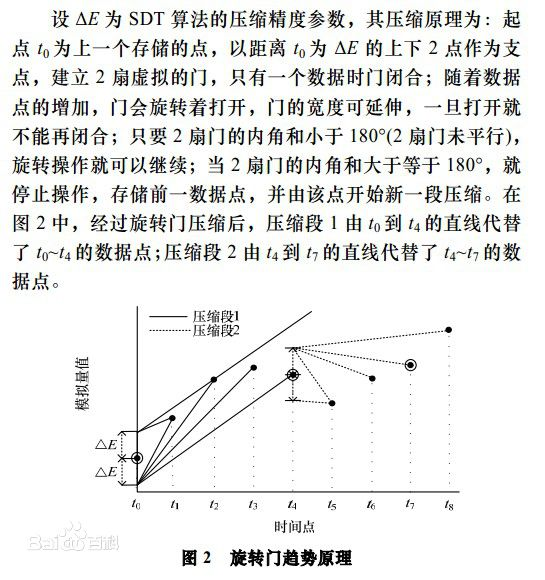
前几天写了一篇关于旋转门的数据压缩算法在PostgreSQL中的实现,里面用到了PostGIS里面的ST_Azimuth函数用来计算夹角,其实在PostgreSQL 中,我们还可以使用三角函数,以及三边来求夹角。
文中用到的计算夹角的方法如下
SELECT 180-ST_Azimuth(
ST_MakePoint(o_x, o_val+i_radius), -- 门上点
ST_MakePoint(v_x, v_val) -- next point
)/(2pi())360 as degAz, -- 上夹角
ST_Azimuth(
ST_MakePoint(o_x, o_val-i_radius), -- 门下点
ST_MakePoint(v_x, v_val) -- next point
)/(2pi())360 As degAzrev -- 下夹角
INTO v_angle1, v_angle2;
余弦定理
cosA=(b²+c²-a²)/(2bc)
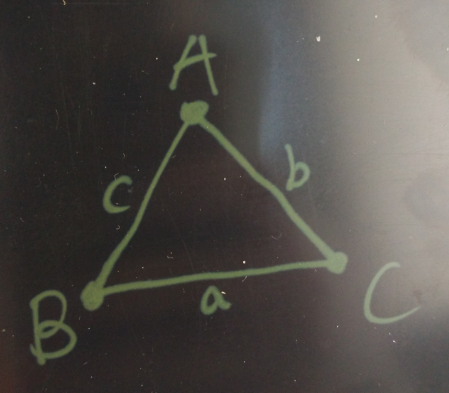
定点为A、B、C; 对的边分别为a、b、c;
PostgreSQL 支持的三角函数
https://www.postgresql.org/docs/9.6/static/functions-math.html
| Function (radians) | Function (degrees) | Description |
|---|---|---|
| acos(x) | acosd(x) | inverse cosine |
| asin(x) | asind(x) | inverse sine |
| atan(x) | atand(x) | inverse tangent |
| atan2(y, x) | atan2d(y, x) | inverse tangent of y/x |
| cos(x) | cosd(x) | cosine |
| cot(x) | cotd(x) | cotangent |
| sin(x) | sind(x) | sine |
| tan(x) | tand(x) | tangent |
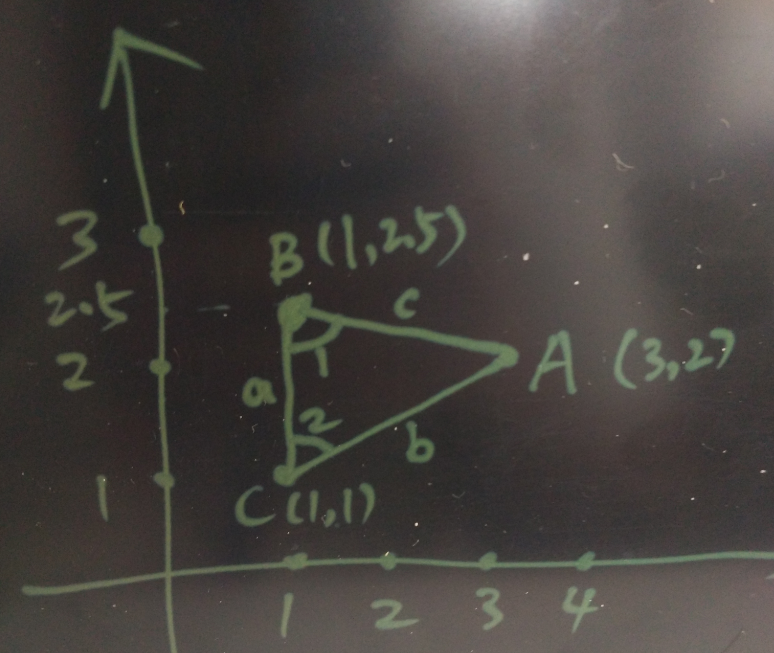
例子
已知三个点A(3,2),B(1,2.5),C(1,1)。 求夹角B, C。
套用余弦公式
cosB=(a²+c²-b²)/(2ac)
cosC=(b²+a²-c²)/(2ba)
首先求三条边长
postgres=# select point_distance(point(3,2), point(1,2.5)) as c , point_distance(point(3,2), point(1,1)) as b , point_distance(point(1,1), point(1,2.5)) as a;
c | b | a
------------------+------------------+-----
2.06155281280883 | 2.23606797749979 | 1.5
(1 row)
运算如下
cosB=(a²+c²-b²)/(2ac)
=(1.5^2 + 2.06155281280883^2 - 2.23606797749979^2) / (21.52.06155281280883)
=0.24253562503633260164
cosC=(b²+a²-c²)/(2ba)
=(1.5^2 + 2.23606797749979^2 - 2.06155281280883^2) / (22.236067977499791.5)
=0.44721359549995825124
求夹角 1 度数
postgres=# select acosd(0.24253562503633260164);
acosd
------------------
75.9637565320735
(1 row)
求夹角 2 度数
postgres=# select acosd(0.44721359549995825124);
acosd
-----------------
63.434948822922
(1 row)
比对使用PostGIS计算的结果一致
test=> SELECT 180-ST_Azimuth(
ST_MakePoint(1,2.5), -- 门上点
ST_MakePoint(3,2) -- next point
)/(2pi())360 as degAz, -- 上夹角
ST_Azimuth(
ST_MakePoint(1,1), -- 门下点
ST_MakePoint(3,2) -- next point
)/(2pi())360 As degAzrev ;
degaz | degazrev
------------------+-----------------
75.9637565320735 | 63.434948822922
(1 row)
源码
三角函数属于浮点运算中的函数
src/backend/utils/adt/float.c
/*
* acosd_q1 - returns the inverse cosine of x in degrees, for x in
* the range [0, 1]. The result is an angle in the
* first quadrant --- [0, 90] degrees.
*
* For the 3 special case inputs (0, 0.5 and 1), this
* function will return exact values (0, 60 and 90
* degrees respectively).
*/
static double
acosd_q1(double x)
{
/*
* Stitch together inverse sine and cosine functions for the ranges [0,
* 0.5] and (0.5, 1]. Each expression below is guaranteed to return
* exactly 60 for x=0.5, so the result is a continuous monotonic function
* over the full range.
*/
if (x <= 0.5)
{
volatile float8 asin_x = asin(x);
return 90.0 - (asin_x / asin_0_5) * 30.0;
}
else
{
volatile float8 acos_x = acos(x);
return (acos_x / acos_0_5) * 60.0;
}
}
/*
* dacosd - returns the arccos of arg1 (degrees)
*/
Datum
dacosd(PG_FUNCTION_ARGS)
{
float8 arg1 = PG_GETARG_FLOAT8(0);
float8 result;
/ Per the POSIX spec, return NaN if the input is NaN /
if (isnan(arg1))
PG_RETURN_FLOAT8(get_float8_nan());
INIT_DEGREE_CONSTANTS();
/*
* The principal branch of the inverse cosine function maps values in the
* range [-1, 1] to values in the range [0, 180], so we should reject any
* inputs outside that range and the result will always be finite.
*/
if (arg1 < -1.0 || arg1 > 1.0)
ereport(ERROR,
(errcode(ERRCODE_NUMERIC_VALUE_OUT_OF_RANGE),
errmsg("input is out of range")));
if (arg1 >= 0.0)
result = acosd_q1(arg1);
else
result = 90.0 + asind_q1(-arg1);
CHECKFLOATVAL(result, false, true);
PG_RETURN_FLOAT8(result);
}
man asin
NAME
asin, asinf, asinl - arc sine function
SYNOPSIS
#include <math.h>
double asin(double x);
float asinf(float x);
long double asinl(long double x);
///
CONFORMING TO
C99, POSIX.1-2001. The variant returning double also conforms to SVr4, 4.3BSD, C89.
SEE ALSO
acos(3), atan(3), atan2(3), casin(3), cos(3), sin(3), tan(3)
祝大家玩得开心,欢迎随时来 阿里云促膝长谈业务需求 ,恭候光临。
阿里云的小伙伴们加油,努力 做好内核与服务,打造最贴地气的云数据库 。
时间: 2024-08-08 07:23:56