11.68 基于锚点标签传播的判别式跟踪 方法
在跟踪中,物体的表观通常是连续不断的变化且不可能是独立同分布的。一个鲁棒的判别式跟踪算法通常需要大量的有标签样本来拟合目标表观潜在的数据分布。然而,精确的有标签样本通常只来自于第一帧,因此数量有限。为了获取更多的有标签样本,大多数算法都是利用当前帧的跟踪结果加较小的扰动 ( 通常是一两个像素 ) 提取正样本,在远离跟踪结果的区域中提取负样本。一旦跟踪结果不精确就容易造成标签分配不准确,误差累积会使分类器的性能下降从而跟丢目标。在无需假设任何数据分布的情况下,能否利用少量的标签样本训练得到比较鲁棒的判别式表观模型?
本节提出了一种基于锚点标签传播 (landmark-based label propagation, LLP) 的判别式跟踪方法。图 1 为基于标签传播的判别式跟踪框架示意图。在该方法中,所有样本都看作是图节点,边表示样本之间的相似性(或者亲近程度)。在每一帧中,由粒子滤波预测得到的候选区域都看作是无标签的样本。它与样本池中其他样本共同组成新的图结构用来训练分类器。每个样本的标签可以表示成锚点标签的加权和。采用局部锚点近似的方法,本节设计了一种有效且高效的样本间邻接矩阵求解策略,并且优化融合拉普拉斯正则项的标签预测目标函数来计算锚点的标签值。这样,根据每个样本与锚点的映射关系及锚点的标签值,LLP 可以计算出每个样本的软标签值。在贝叶斯推理框架下,软标签预测值最高的候选目标将被视为最终的跟踪结果。LLP可以有效地将少量的初始标签传播给其他大量的无标签数据,非常符合目标跟踪的需求。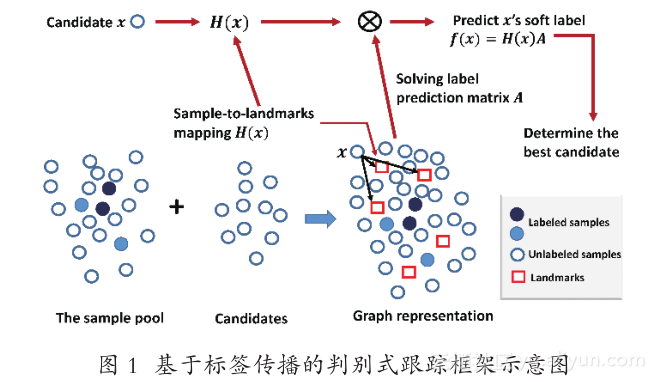
LLP 的核心思想就是每个样本的标签值可以表示成其近邻锚点标签值的线性组合。为此,本节采用局部锚点近似的策略构建所有样本间的邻接矩阵。并且拉普拉斯正则项也被整合在标签预测的目标函数中,以便保留样本的局部几何结构。保留局部的几何结构信息能使本节所提出的跟踪算法具有更好的判别力从而适应表观变化。