转自:http://blog.chinaunix.net/uid-20672257-id-3147337.html
一、kobject的定义:
kobject是Linux2.6引入的设备管理机制,在内核中由struct kobject结构表示,这个结构使所有设备在底层都具有统一的接口.kobject提供了基本的对象管理能力,是构成Linux2.6设备模型的核心结构,它与sysfs文件系统紧密联系,每个在内核中注册kobject对象都对应与sysfs文件系统中的一个目录;kobject--->sysfs.dir;其结构定义为:
struct kobject
{
const char* k_name; //指向设备名称的指针
char name[KOBJ_NAME_LEN]; //设备名称
struct kref kref; //内核对象的引用计数
struct list_head entry; //挂接到当前内核对象所在kset中的单元
struct kobject* parent; //指向父对象的指针
struct kset* kset; //内核对象所属kset的指针
struct kobj_type* ktype; //指向内核对象类型描述符的指针
struct dentry* dentry; //sysfs文件系统中与该内核对象对应的文件节点路径的指针
wait_queue_head_t poll; //IO等待队列;
};
二、kobject相关函数:
1、void kobject_init(struct kobject* kobj);
该函数用于初始化kobject对象,它设置kobject对象的引用计数为1,entry字段指向自身,其所属kset对象的引用计数加1;
2、void kobject_cleanup(struct kobject* kobj);
void kobject_release(struct kref* ref);
这两个函数用于清除kobject对象,当其引用计数为0时,释放对象所占用的资源;
3、int kobject_set_name(struct kobject* kobj, const char* format, ...);
该函数用于设置指定kobject对象的名称;
4、const char* kobject_name(const struct kobject* kobj);
该函数用于返回指定kobject的名称;
5、int kobject_rename(struct kobject* kobj, const char* new_name);
该函数用于为指定kobject对象重命名;
6、struct kobject* kobject_get(struct kobject* kobj);
该函数用于将kobject对象的引用计数加1,相当于申请了一个kobject对象资源,同时返回该kobject对象的指针;
7、void kobject_put(struct kobject* kobj);
该函数用于将kobject对象的引用计数减1,相当于释放了一个kobject对象资源;当引用计数为0时,则调用kobject_release()释放该kobject对象的资源;
8、int kobject_add(struct kobject* kobj);
该函数用于注册kobject对象,即:加入到Linux的设备层次中,它会挂接该kobject对象到kset的list链中,增加父目录各级kobject对象的引用计数,在其parent字段指向的目录下创建对应的文件节点,并启动该类型kobject对象的hotplug()函数;
9、void kobject_del(struct kobject* kobj);
该函数与kobject_add()相反,用于注销kobject对象,即:中止该kobject对象的hotplug()函数,从Linux的设备层次中删除该kobject对象,删除该kobject对象在sysfs文件系统中对应的文件节点;
10、int kobject_register(struct kobject* obj);
该函数用于注册kobject对象,它首先会调用kobject_init()初始化kobj,然后再调用kobject_add()完成该内核对象的添加;
11、void kobject_unregister(struct kobject* kobj);
该函数与kobject_register()相反,用于注销kobject对象,它首先调用kobject_del()从Linux的设备层次中删除kobject对象,再调用kobject_put()减少该kobject对象的引用计数,当引用计数为0时,则释放该kobject对象的资源;
12、struct kobject* kobject_add_dir(struct kobject*, const char* path);
该函数用于在sysfs文件系统中为该kobject对象创建对应的目录;
13、char* kobject_get_path(struct kobject* kobj);
该函数用于返回该kobject对象在sysfs文件系统中的对应目录路径;
三、kobject的行为:
typedef int __bitwise kobject_action_t;
enum kobject_action
{
KOBJ_ADD = (__force kobject_action_t) 0x01, //exclusive to core
KOBJ_REMOVE = (__force kobject_action_t) 0x02, //exclusive to core
KOBJ_CHANGE = (__force kobject_action_t) 0x03, //device state change
KOBJ_MOUNT = (__force kobject_action_t) 0x04, //mount event for block devices (broken)
KOBJ_UMOUNT = (__force kobject_action_t) 0x05, //umount event for block devices (broken)
KOBJ_OFFLINE = (__force kobject_action_t) 0x06, //device offline
KOBJ_ONLINE = (__force kobject_action_t) 0x07, //device online
};
该枚举类型用于定义kobject对象的状态更新消息码,也就是热插拔事件码;
备注:struct kobject结构定义于文件include/linux/kobject.h
下面转自:http://blog.chinaunix.net/u1/57901/showart_1803248.html
在LINUX中最让人不解的大概就是/sys下面的内容了
下面首先让我们来创建一个简单的platform设备,并从这个设备的视角进行深入,在此篇文章的深入过程中,我们只看kobeject的模型我所使用的内核版本号为2.6.26,操作系统的内核版本号为2.6.27-7,暂未发现2.6.27-7与2.6.26的重大不同
首先写一个简单的模块
#include
#include
#include
static int __init test_probe(struct platform_device *pdev)
{
int err = 0;
return err;
}
static int test_remove(struct platform_device *pdev)
{
return 0;
}
static struct platform_device test_device = {
.name = "test_ts",
.id = -1,
};
static struct platform_driver test_driver = {
.probe = test_probe,
.remove = test_remove,
.driver = {
.name = "test_ts",
.owner = THIS_MODULE,
},
};
static int __devinit test_init(void)
{
platform_device_register(&test_device);
return platform_driver_register(&test_driver);
}
static void __exit test_exit(void)
{
platform_device_unregister(&test_device);
platform_driver_unregister(&test_driver);
}
module_init(test_init);
module_exit(test_exit);
MODULE_AUTHOR("zwolf");
MODULE_DESCRIPTION("Module test");
MODULE_LICENSE("GPL");
MODULE_ALIAS("test");
接下来是makefile
#Makefile
obj-m:=test.o
KDIR:=/lib/modules/2.6.27-7-generic/build
PWD:=$(shell pwd)
default:
$(MAKE) -C $(KDIR) M=$(PWD) modules
KDIR中的目录请改为各位实际运行中的内核目录make之后进行模块的加载 sudo insmod ./test.ko
现在到sys目录中查看我们的设备是否已经加载上了
首先是/sys/bus/platform/devices/在devices下,每一个连接文件都代表了一个设备ls可看见test_ts,进入test_ts,ls可发现driver这个链接文件,ls-l查看,发现这个文件是连到/sys/bus/platform/drivers/test_ts的
这里需要说明的是连接的含义,并不是driver驱动存在于test_ts这个设备中,而是test_ts使用的驱动为/sys/bus/platform/drivers/test_ts
现在换到/sys/bus/platform/drivers这个目录下
ls查看会发现这里的文件都为目录,而非连接文件,说明这是驱动真正放置的位置
现在进入test_ts目录,然后ls,发现有一个test_ts的连接文件,ls –l查看可发现该文件连接到/sys/devices/platform/test_ts下
回到/sys/bus/platform/devices/下ls –l也会发现test_ts连接到/sys/devices/platform/test_ts
为什么test_ts这个设备放置于/sys/devices/platform下,而不是/sys/bus/platform/devices下呢
我认为和直观性有关,在sys下有这么几个目录block bus class dev devices firmware kernel module fs power
devices很直观的说明了设备在这个目录下
再来看组成这个目录图的核心,kobject图,我也叫他层次图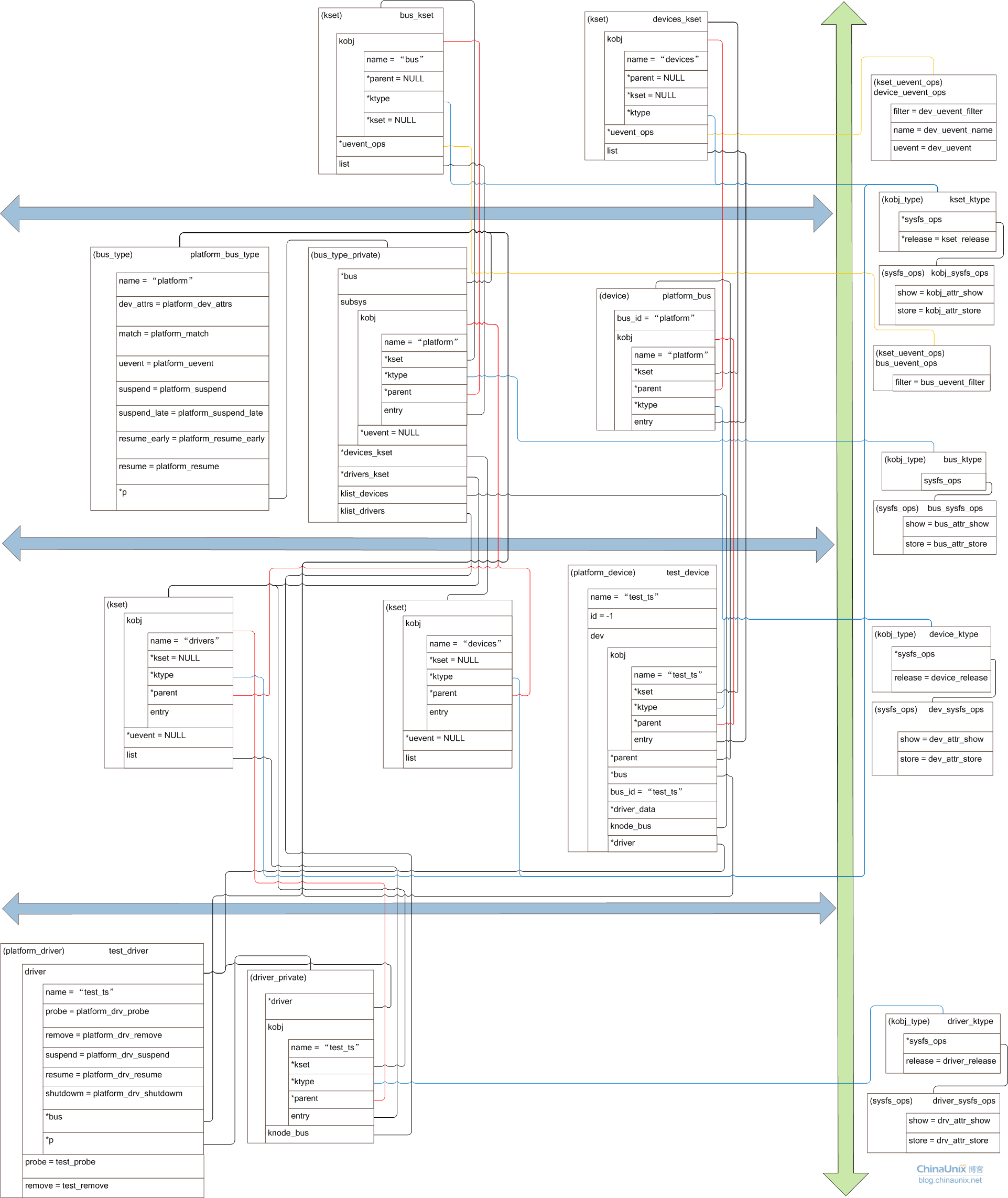
不看大号绿色箭头右边的内容的话是不是发现两个架构相同?
对的,kobject的层次决定了目录的结构
kobeject图很大,但也不要担心,里面的内容其实不多,基础框架涉及3个主要结构kset kobject和ktype
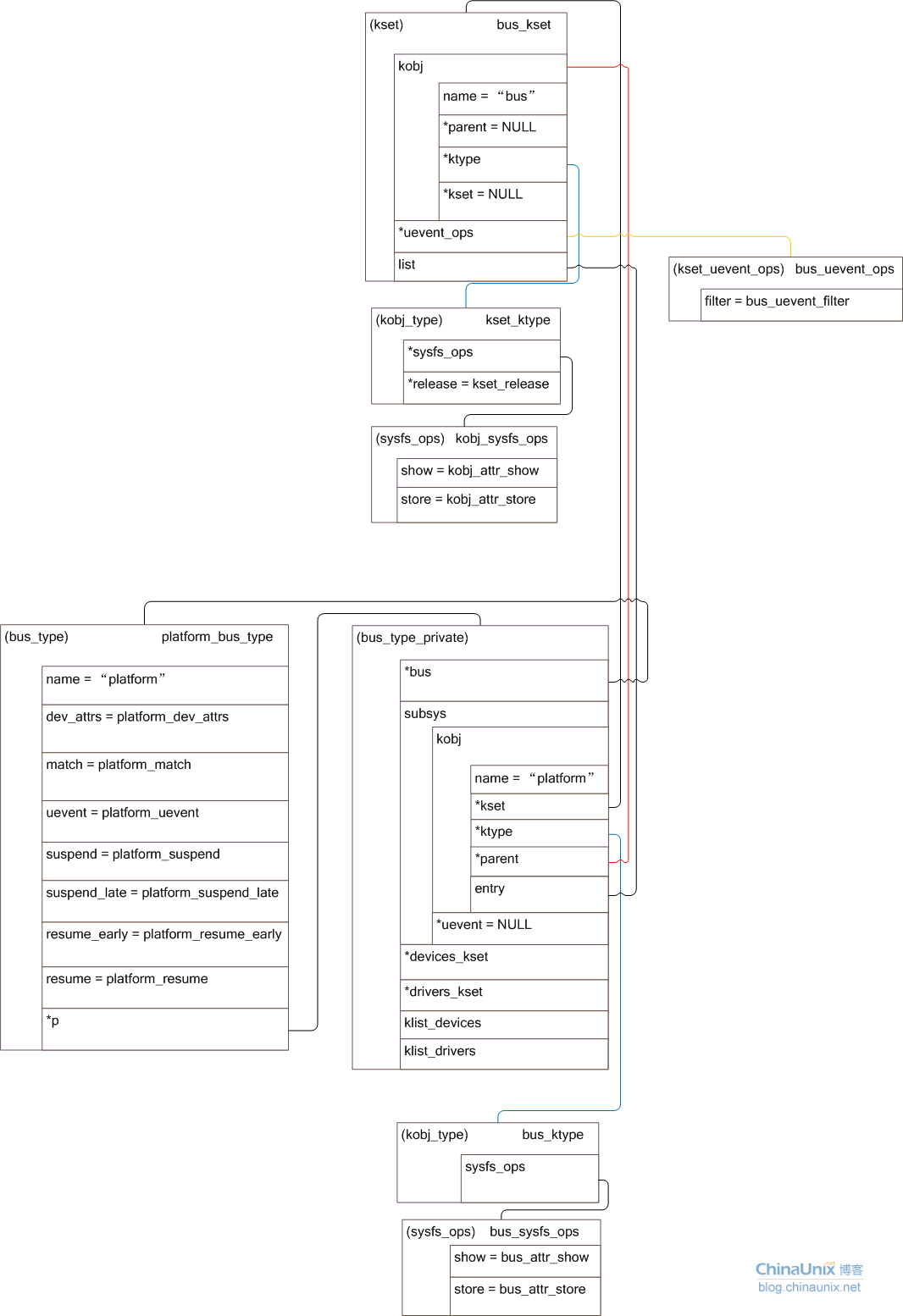
在说明test_ts的注册之前,先让我们看一下sys下的两个基础目录bus,devices
首先是bus
bus的注册在/drivers/base/bus.c里
int __init buses_ini
t(void)
{
bus_kset = kset_create_and_add("bus", &bus_uevent_ops, NULL);
if (!bus_kset)
return -ENOMEM;
return 0;
}
先看bus_uevent_ops,这是一个uevent的操作集(我也还没清楚uevent的用途,所以uevent的内容先放着)
然后到kset_create_and_add
struct kset *kset_create_and_add(const char *name,
struct kset_uevent_ops *uevent_ops,
struct kobject *parent_kobj)
//传递进来的参数为("bus", &bus_uevent_ops, NULL)
{
struct kset *kset;
int error;
//创建一个kset容器
kset = kset_create(name, uevent_ops, parent_kobj);
if (!kset)
return NULL;
//注册创建的kset容器
error = kset_register(kset);
if (error) {
kfree(kset);
return NULL;
}
return kset;
}
首先需要创建一个kset容器
static struct kset *kset_create(const char *name,
struct kset_uevent_ops *uevent_ops,
struct kobject *parent_kobj)
//传递进来的参数为("bus", &bus_uevent_ops, NULL)
{
struct kset *kset;
//为kset分配内存
kset = kzalloc(sizeof(*kset), GFP_KERNEL);
if (!kset)
return NULL;
//设置kset中kobject的名字,这里为bus
kobject_set_name(&kset->kobj, name);
//设置uevent操作集,这里为bus_uevent_ops
kset->uevent_ops = uevent_ops;
//设置父对象,这里为NULL
kset->kobj.parent = parent_kobj;
//设置容器操作集
kset->kobj.ktype = &kset_ktype;
//设置父容器
kset->kobj.kset = NULL;
return kset;
}
这里的ktype,也就是kset_ktype是一个操作集,用于为sys下文件的实时反馈做服务,例如我们cat name的时候就要通过ktype提供的show函数,具体什么怎么运用,将在后面讲解
现在回到kset_create_and_add中的kset_register,将建立好的kset添加进sys里
int kset_register(struct kset *k)
{
int err;
if (!k)
return -EINVAL;
//初始化
kset_init(k);
//添加该容器
err = kobject_add_internal(&k->kobj);
if (err)
return err;
kobject_uevent(&k->kobj, KOBJ_ADD);
return 0;
}
kset_init进行一些固定的初始化操作,里面没有我们需要关心的内容
kobject_add_internal为重要的一个函数,他对kset里kobj的从属关系进行解析,搭建正确的架构
static int kobject_add_internal(struct kobject *kobj)
{
int error = 0;
struct kobject *parent;
//检测kobj是否为空
if (!kobj)
return -ENOENT;
//检测kobj名字是否为空
if (!kobj->name || !kobj->name[0]) {
pr_debug("kobject: (%p): attempted to be registered with empty "
"name!\n", kobj);
WARN_ON(1);
return -EINVAL;
}
//提取父对象
parent = kobject_get(kobj->parent);
/* join kset if set, use it as parent if we do not already have one */
//父容器存在则设置父对象
if (kobj->kset) {//在bus的kset中为空,所以不会进入到下面的代码
//检测是否已经设置父对象
if (!parent)
//无则使用父容器为父对象
parent = kobject_get(&kobj->kset->kobj);
//添加该kobj到父容器的链表中
kobj_kset_join(kobj);
//设置父对象
kobj->parent = parent;
}
pr_debug("kobject: '%s' (%p): %s: parent: '%s', set: '%s'\n",
kobject_name(kobj), kobj, __func__,
parent ? kobject_name(parent) : "",
kobj->kset ? kobject_name(&kobj->kset->kobj) : "");
//建立相应的目录
error = create_dir(kobj);
if (error) {
kobj_kset_leave(kobj);
kobject_put(parent);
kobj->parent = NULL;
if (error == -EEXIST)
printk(KERN_ERR "%s failed for %s with "
"-EEXIST, don't try to register things with "
"the same name in the same directory.\n",
__func__, kobject_name(kobj));
else
printk(KERN_ERR "%s failed for %s (%d)\n",
__func__, kobject_name(kobj), error);
dump_stack();
} else
kobj->state_in_sysfs = 1;
return error;
}
至此bus的目录就建立起来了
模型如下
接下来是devices,在/drivers/base/core.c里
int __init devices_init(void)
{
devices_kset = kset_create_and_add("devices", &device_uevent_ops, NULL);
if (!devices_kset)
return -ENOMEM;
return 0;
}
过程和bus的注册一致,我就不复述了~
模型如下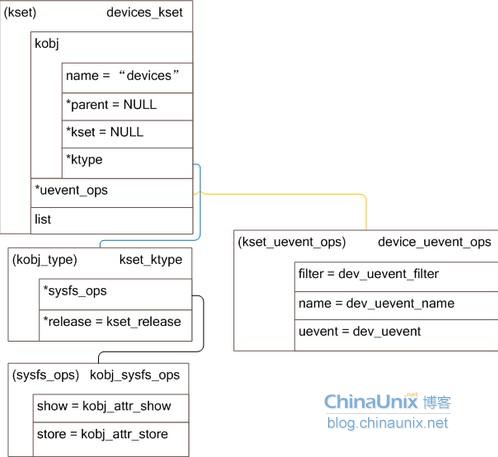
然后是platform的注册
在platform的注册中,分为两个部分,一部分是注册到devices中,另一部分是注册到bus中,代码在/drivers/base/platform.c中
int __init platform_bus_init(void)
{
int error;
//注册到devices目录中
error = device_register(&platform_bus);
if (error)
return error;
//注册到bus目录中
error = bus_register(&platform_bus_type);
if (error)
device_unregister(&platform_bus);
return error;
}
首先是device_register,注册的参数为platform_bus,如下所示
struct device platform_bus = {
.bus_id = "platform",
};
很简单,只有一个参数,表明了目录名
int device_register(struct device *dev)
{
//初始化dev结构
device_initialize(dev);
//添加dev至目录
return device_add(dev);
}
void device_initialize(struct device *dev)
{
//重要的一步,指明了父容器为devices_kset,而devices_kset的注册在前面已经介绍过了
dev->kobj.kset = devices_kset;
//初始化kobj的ktype为device_ktype
kobject_init(&dev->kobj, &device_ktype);
klist_init(&dev->klist_children, klist_children_get,
klist_children_put);
INIT_LIST_HEAD(&dev->dma_pools);
INIT_LIST_HEAD(&dev->node);
init_MUTEX(&dev->sem);
spin_lock_init(&dev->devres_lock);
INIT_LIST_HEAD(&dev->devres_head);
device_init_wakeup(dev, 0);
set_dev_node(dev, -1);
}
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct class_interface *class_intf;
int error;
dev = get_device(dev);
if (!dev || !strlen(dev->bus_id)) {
error = -EINVAL;
goto Done;
}
pr_debug("device: '%s': %s\n", dev->bus_id, __func__);
parent = get_device(dev->parent);
setup_parent(dev, parent);
if (parent)
set_dev_node(dev, dev_to_node(parent));
//设置dev->kobj的名字和父对象,并建立相应的目录
error = kobject_add(&dev->kobj, dev->kobj.parent, "%s", dev->bus_id);
if (error)
goto Error;
if (platform_notify)
platform_notify(dev);
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_ADD_DEVICE, dev);
//建立uevent文件
error = device_create_file(dev, &uevent_attr);
if (error)
goto attrError;
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &devt_attr);
if (error)
goto ueventattrError;
}
//建立subsystem连接文件连接到所属class,这里没有设置class对象所以不会建立
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
//建立dev的描述文件,这里没有设置描述文件所以不会建立
error = device_add_attrs(dev);
if (error)
goto AttrsError;
//建立链接文件至所属bus,这里没有设置所属bus所以不会建立
error = bus_add_device(dev);
if (error)
goto BusError;
//添加power文件,因为platform不属于设备,所以不会建立power文件
error = device_pm_add(dev);
if (error)
goto PMError;
kobject_uevent(&dev->kobj, KOBJ_ADD);
//检测驱动中有无适合的设备进行匹配,但没有设置bus,所以不会进行匹配
bus_attach_device(dev);
if (parent)
klist_add_tail(&dev->knode_parent, &parent->klist_children);
if (dev->class) {
down(&dev->class->sem);
list_add_tail(&dev->node, &dev->class->devices);
list_for_each_entry(class_intf, &dev->class->interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
up(&dev->class->sem);
}
Done:
put_device(dev);
return error;
PMError:
bus_remove_device(dev);
BusError:
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,
BUS_NOTIFY_DEL_DEVICE, dev);
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
device_remove_file(dev, &devt_attr);
ueventattrError:
device_remove_file(dev, &uevent_attr);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
goto Done;
}
在kobject_add-> kobject_add_varg-> kobject_add_internal中
//提取父对象,因为没有设置,所以为空
parent = kobject_get(kobj->parent);
//父容器存在则设置父对象,在前面的dev->kobj.kset = devices_kset中设为了devices_kset
if (kobj->kset) {
//检测是否已经设置父对象
if (!parent)
//无则使用父容器为父对象
parent = kobject_get(&kobj->kset->kobj);
//添加该kobj到父容器的链表中
kobj_kset_join(kobj);
//设置父对象
kobj->parent = parent;
}
现在devices下的platform目录建立好了,模型如下,其中红线描绘了目录关系
现在到bus_register了
注册的参数platform_bus_type如下所示
struct bus_type platform_bus_type = {
.name = "platform",
.dev_attrs = platform_dev_attrs,
.match = platform_match,
.uevent = platform_uevent,
.suspend = platform_suspend,
.suspend_late = platform_suspend_late,
.resume_early = platform_resume_early,
.resume = platform_resume,
};
int bus_register(struct bus_type *bus)
{
int retval;
//声明一个总线私有数据并分配空间
struct bus_type_private *priv;
priv = kzalloc(sizeof(struct bus_type_private), GFP_KERNEL);
if (!priv)
return -ENOMEM;
//互相关联
priv->bus = bus;
bus->p = priv;
BLOCKING_INIT_NOTIFIER_HEAD(&priv->bus_notifier);
//设置私有数据中kobj对象的名字
retval = kobject_set_name(&priv->subsys.kobj, "%s", bus->name);
if (retval)
goto out;
//设置父容器为bus_kset,操作集为bus_ktype
priv->subsys.kobj.kset = bus_kset;
priv->subsys.kobj.ktype = &bus_ktype;
priv->drivers_autoprobe = 1;
//注册bus容器
retval = kset_register(&priv->subsys);
if (retval)
goto out;
//建立uevent属性文件
retval = bus_create_file(bus, &bus_attr_uevent);
if (retval)
goto bus_uevent_fail;
//建立devices目录
priv->devices_kset = kset_create_and_add("devices", NULL,
&priv->subsys.kobj);
if (!priv->devices_kset) {
retval = -ENOMEM;
goto bus_devices_fail;
}
//建立drivers目录
priv->drivers_kset = kset_create_and_add("drivers", NULL,
&priv->subsys.kobj);
if (!priv->drivers_kset) {
retval = -ENOMEM;
goto bus_drivers_fail;
}
//初始化klist_devices和klist_drivers链表
klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put);
klist_init(&priv->klist_drivers, NULL, NULL);
//增加probe属性文件
retval = add_probe_files(bus);
if (retval)
goto bus_probe_files_fail;
//增加总线的属性文件
retval = bus_add_attrs(bus);
if (retval)
goto bus_attrs_fail;
pr_debug("bus: '%s': registered\n", bus->name);
return 0;
bus_attrs_fail:
remove_probe_files(bus);
bus_probe_files_fail:
kset_unregister(bus->p->drivers_kset);
bus_drivers_fail:
kset_unregister(bus->p->devices_kset);
bus_devices_fail:
bus_remove_file(bus, &bus_attr_uevent);
bus_uevent_fail:
kset_unregister(&bus->p->subsys);
kfree(bus->p);
out:
return retval;
}
在kset_register-> kobject_add_internal中
//提取父对象,因为没有设置父对象,所以为空
parent = kobject_get(kobj->parent);
//父容器存在则设置父对象,在上文中设置了父容器priv->subsys.kobj.kset = bus_kset
if (kobj->kset) {
//检测是否已经设置父对象
if (!parent)
//无则使用父容器为父对象
parent = kobject_get(&kobj->kset->kobj);
//添加该kobj到父容器的链表中
kobj_kset_join(kobj);
//设置父对象
kobj->parent = parent;
}
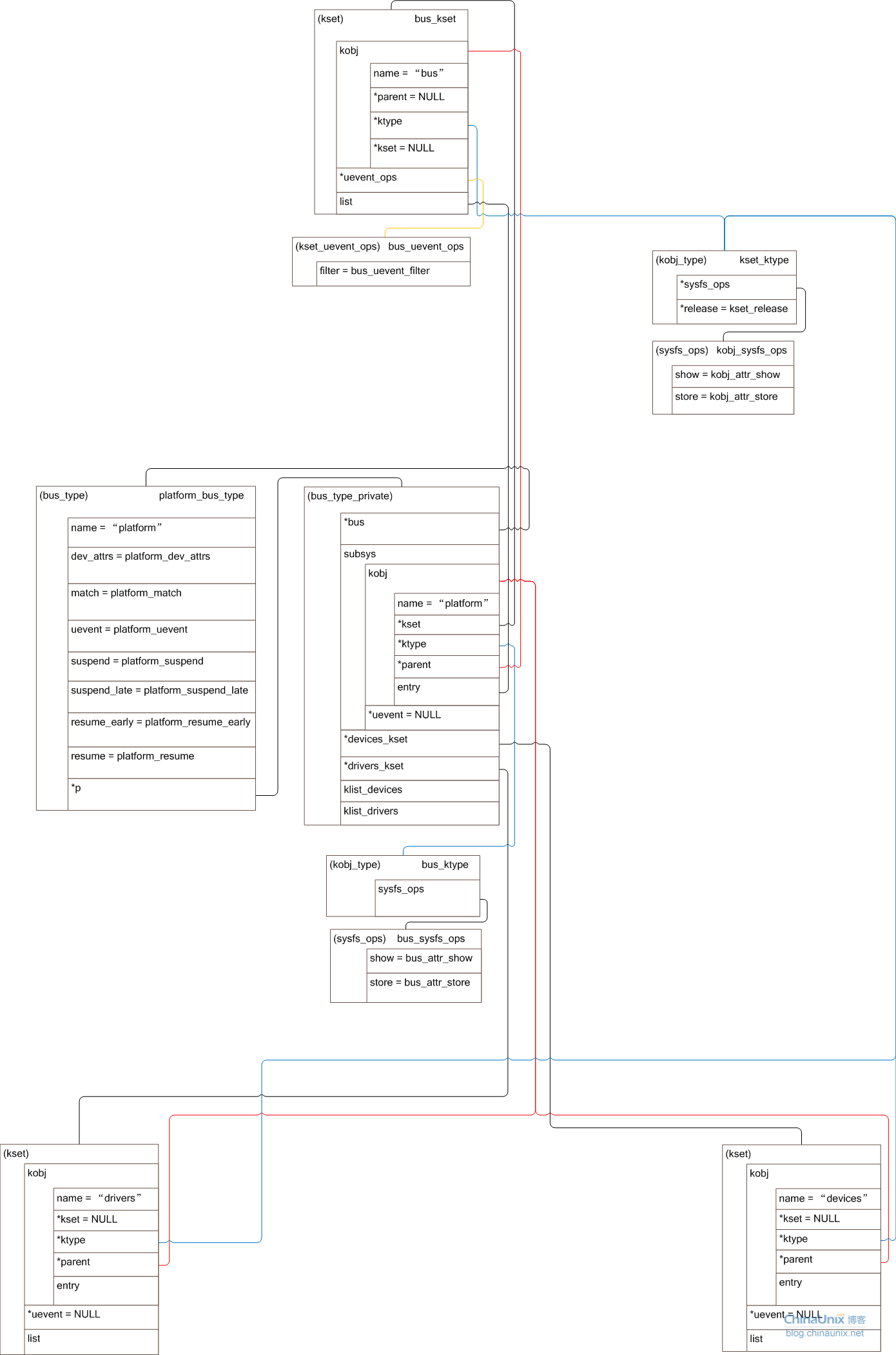
在retval = kset_register(&priv->subsys)完成之后platform在bus下的模型如下图
有印象的话大家还记得在platform下面有两个目录devices和drivers吧~
现在就到这两个目录的注册了
priv->devices_kset = kset_create_and_add("devices", NULL,&priv->subsys.kobj);
priv->drivers_kset = kset_create_and_add("drivers", NULL, &priv->subsys.kobj);
注意这两条语句的头部
priv->devices_kset = kset_create_and_add
priv->drivers_kset = kset_create_and_add
可以清楚的看到bus_type_private下的devices_kset, drivers_kset分别连接到了devices,drivers的kset上
现在来看kset_create_and_add("devices", NULL,&priv->subsys.kobj);
struct kset *kset_create_and_add(const char *name,
struct kset_uevent_ops *uevent_ops,
struct kobject *parent_kobj)
//参数为"devices", NULL,&priv->subsys.kobj
{
struct kset *kset;
int error;
//创建一个kset容器
kset = kset_create(name, uevent_ops, parent_kobj);
if (!kset)
return NULL;
//注册创建的kset容器
error = kset_register(kset);
if (error) {
kfree(kset);
return NULL;
}
return kset;
}
在kset_create 中比较重要的操作为
kset->kobj.ktype = &kset_ktype //设置了ktype,为kset_ktype
kset->kobj.parent = parent_kobj; //设置了父对象,为priv->subsys.kobj,也就是platform_bus_type->p->subsys.kobj
kset->kobj.kset = NULL; //设置父容器为空
在kset_register中
//提取父对象
parent = kobject_get(kobj->parent); //在之前设置为了
//父容器存在则设置父对象,由于父容器为空,不执行以下代码
if (kobj->kset) {
//检测是否已经设置父对象
if (!parent)
//无则使用父容器为父对象
parent = kobject_get(&kobj->kset->kobj);
//添加该kobj到父容器的链表中
kobj_kset_join(kobj);
//设置父对象
kobj->parent = parent;
}
至此, devices的模型就建立好了,drivers模型的建立和devices是一致的,只是名字不同而已,我就不复述了,建立好的模型如下
好了~ 到了这里,bus,devices和platform的基础模型就就建立好了,就等设备来注册了
在platform模型设备的建立中,需要2个部分的注册,驱动的注册和设备的注册
platform_device_register(&test_device);
platform_driver_register(&test_driver);
首先看platform_device_register
注册参数为test_device,结构如下
static struct platform_device test_device = {
.name = "test_ts",
.id = -1,
//. resource
//.dev
};
这个结构主要描述了设备的名字,ID和资源和私有数据,其中资源和私有数据我们在这里不使用,将在别的文章中进行讲解
int platform_device_register(struct platform_device *pdev)
{
//设备属性的初始化
device_initialize(&pdev->dev);
//将设备添加进platform里
return platform_device_add(pdev);
}
void device_initialize(struct device *dev)
{
dev->kobj.kset = devices_kset; //设置kset为devices_kset,则将设备挂接上了devices目录
kobject_init(&dev->kobj, &device_ktype); //初始化kobeject,置ktype为device_ktype
klist_init(&dev->klist_children, klist_children_get,
klist_children_put);
INIT_LIST_HEAD(&dev->dma_pools);
INIT_LIST_HEAD(&dev->node);
init_MUTEX(&dev->sem);
spin_lock_init(&dev->devres_lock);
INIT_LIST_HEAD(&dev->devres_head);
device_init_wakeup(dev, 0);
set_dev_node(dev, -1);
}
int platform_device_add(struct platform_device *pdev)
{
int i, ret = 0;
if (!pdev)
return -EINVAL;
//检测是否设置了dev中的parent,无则赋为platform_bus
if (!pdev->dev.parent)
pdev->dev.parent = &platform_bus;
//设置dev中的bus为platform_bus_type
pdev->dev.bus = &platform_bus_type;
//检测id,id为-1表明该设备只有一个,用设备名为bus_id
//不为1则表明该设备有数个,需要用序号标明bus_id
if (pdev->id != -1)
snprintf(pdev->dev.bus_id, BUS_ID_SIZE, "%s.%d", pdev->name,
pdev->id);
else
strlcpy(pdev->dev.bus_id, pdev->name, BUS_ID_SIZE);
//增加资源到资源树中
for (i = 0; i < pdev->num_resources; i++) {
struct resource *p, *r = &pdev->resource;
if (r->name == NULL)
r->name = pdev->dev.bus_id;
p = r->parent;
if (!p) {
if (r->flags & IORESOURCE_MEM)
p = &iomem_resource;
else if (r->flags & IORESOURCE_IO)
p = &ioport_resource;
}
if (p && insert_resource(p, r)) {
printk(KERN_ERR "%s: failed to claim resource %d\n",pdev->dev.bus_id, i);
ret = -EBUSY;
goto failed;
}
}
pr_debug("Registering platform device '%s'. Parent at %s\n",pdev->dev.bus_id, pdev->dev.parent->bus_id);
//添加设备到设备层次中
ret = device_add(&pdev->dev);
if (ret == 0)
return ret;
failed:
while (--i >= 0)
if (pdev->resource.flags & (IORESOURCE_MEM|IORESOURCE_IO))
release_resource(&pdev->resource);
return ret;
}
int device_add(struct device *dev)
{
struct device *parent = NULL;
struct class_interface *class_intf;
int error;
dev = get_device(dev);
if (!dev || !strlen(dev->bus_id)) {
error = -EINVAL;
goto Done;
}
pr_debug("device: '%s': %s\n", dev->bus_id, __func__);
//取得上层device,而dev->parent的赋值是在platform_device_add中的pdev->dev.parent = &platform_bus完成的
parent = get_device(dev->parent);
//以上层devices为准重设dev->kobj.parent
setup_parent(dev, parent);
if (parent)
set_dev_node(dev, dev_to_node(parent));
//设置dev->kobj的名字和父对象,并建立相应目录
error = kobject_add(&dev->kobj, dev->kobj.parent, "%s", dev->bus_id);
if (error)
goto Error;
if (platform_notify)
platform_notify(dev);
//一种新型的通知机制,但是platform中没有设置相应的结构,所以在这里跳过
/* notify clients of device entry (new way) */
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,BUS_NOTIFY_ADD_DEVICE, dev);
//建立uevent文件
error = device_create_file(dev, &uevent_attr);
if (error)
goto attrError;
//设备有设备号则建立dev文件
if (MAJOR(dev->devt)) {
error = device_create_file(dev, &devt_attr);
if (error)
goto ueventattrError;
}
//建立subsystem连接文件连接到所属class
error = device_add_class_symlinks(dev);
if (error)
goto SymlinkError;
//添加dev的描述文件
error = device_add_attrs(dev);
if (error)
goto AttrsError;
//添加链接文件至所属bus
error = bus_add_device(dev);
if (error)
goto BusError;
//添加power文件
error = device_pm_add(dev);
if (error)
goto PMError;
kobject_uevent(&dev->kobj, KOBJ_ADD);
//检测驱动中有无适合的设备进行匹配,现在只添加了设备,还没有加载驱动,所以不会进行匹配
bus_attach_device(dev);
if (parent)
klist_add_tail(&dev->knode_parent, &parent->klist_children);
if (dev->class) {
down(&dev->class->sem);
list_add_tail(&dev->node, &dev->class->devices);
list_for_each_entry(class_intf, &dev->class->interfaces, node)
if (class_intf->add_dev)
class_intf->add_dev(dev, class_intf);
up(&dev->class->sem);
}
Done:
put_device(dev);
return error;
PMError:
bus_remove_device(dev);
BusError:
if (dev->bus)
blocking_notifier_call_chain(&dev->bus->p->bus_notifier,BUS_NOTIFY_DEL_DEVICE, dev);
device_remove_attrs(dev);
AttrsError:
device_remove_class_symlinks(dev);
SymlinkError:
if (MAJOR(dev->devt))
device_remove_file(dev, &devt_attr);
ueventattrError:
device_remove_file(dev, &uevent_attr);
attrError:
kobject_uevent(&dev->kobj, KOBJ_REMOVE);
kobject_del(&dev->kobj);
Error:
cleanup_device_parent(dev);
if (parent)
put_device(parent);
goto Done;
}
static void setup_parent(struct device *dev, struct device *parent)
{
struct kobject *kobj;
//取得上层device的kobj
kobj = get_device_parent(dev, parent);
//kobj不为空则重设dev->kobj.parent
if (kobj)
dev->kobj.parent = kobj;
}
static struct kobject *get_device_parent(struct device *dev,
struct device *parent)
{
int retval;
//因为dev->class为空,所以跳过这段代码
if (dev->class) {
struct kobject *kobj = NULL;
struct kobject *parent_kobj;
struct kobject *k;
if (parent == NULL)
parent_kobj = virtual_device_parent(dev);
else if (parent->class)
return &parent->kobj;
else
parent_kobj = &parent->kobj;
spin_lock(&dev->class->class_dirs.list_lock);
list_for_each_entry(k, &dev->class->class_dirs.list, entry)
if (k->parent == parent_kobj) {
kobj = kobject_get(k);
break;
}
spin_unlock(&dev->class->class_dirs.list_lock);
if (kobj)
return kobj;
k = kobject_create();
if (!k)
return NULL;
k->kset = &dev->class->class_dirs;
retval = kobject_add(k, parent_kobj, "%s", dev->class->name);
if (retval < 0) {
kobject_put(k);
return NULL;
}
return k;
}
if (parent)
//返回上层device的kobj
return &parent->kobj;
return NULL;
}
在bus_attach_device中虽然没有成功进行匹配,但是有很重要的一步为之后正确的匹配打下基础
void bus_attach_device(struct device *dev)
{
struct bus_type *bus = dev->bus;
int ret = 0;
if (bus) {
if (bus->p->drivers_autoprobe)
ret = device_attach(dev);
WARN_ON(ret < 0);
if (ret >= 0)
klist_add_tail(&dev->knode_bus, &bus->p->klist_devices);
}
}
klist_add_tail(&dev->knode_bus, &bus->p->klist_devices)就是这一行
在这一行代码中将设备挂载到了bus下的devices链表下,这样,当驱动请求匹配的时候,platform总线就会历遍devices链表为驱动寻找合适的设备
现在来看一下test_device的模型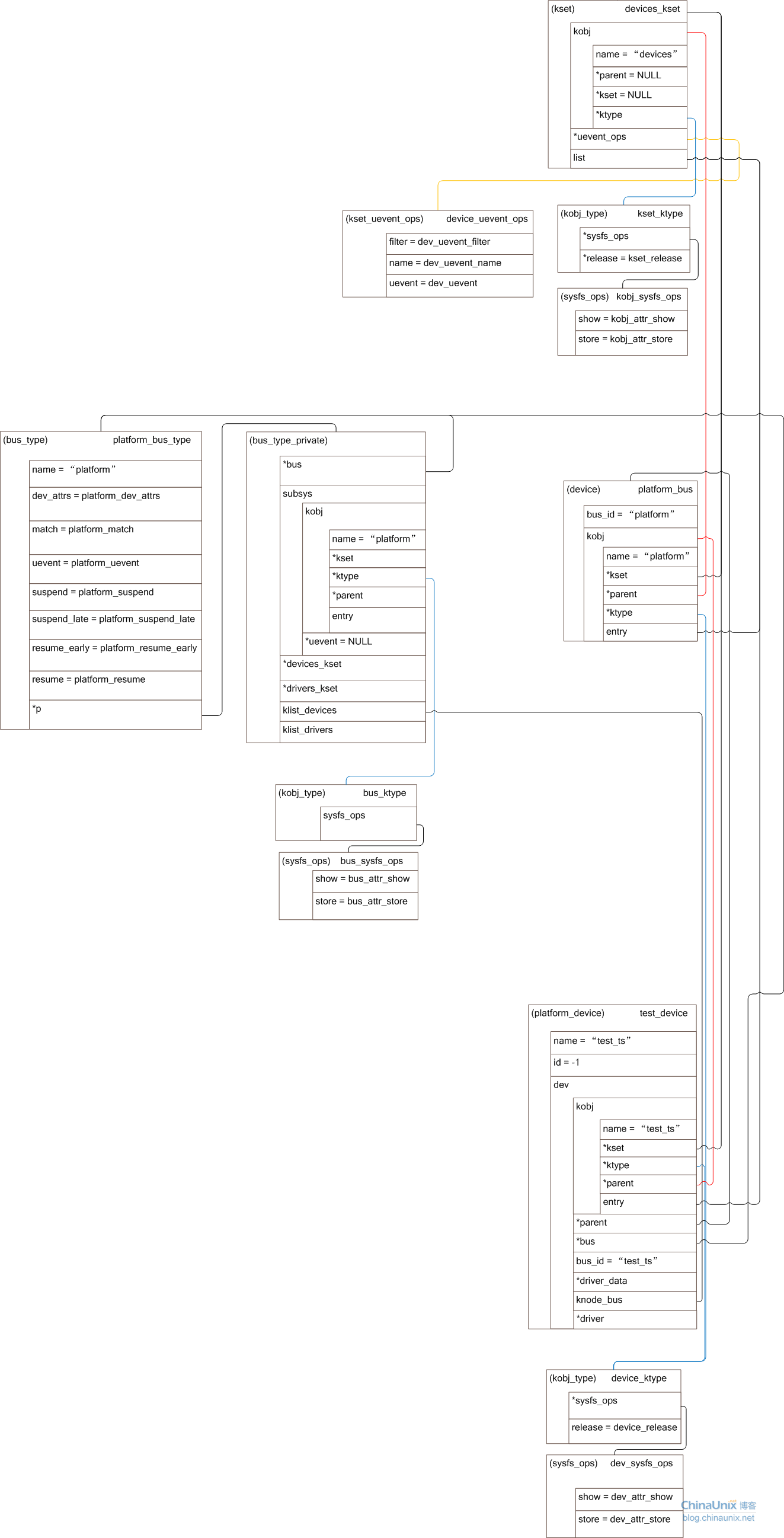
然后platform_driver_unregister,他的参数 test_driver的结构如下
static struct platform_driver test_driver = {
.probe = test_probe,
.remove = test_remove,
.driver = {
.name = "test_ts",
.owner = THIS_MODULE,
},
};
int platform_driver_register(struct platform_driver *drv)
{
drv->driver.bus = &platform_bus_type;
if (drv->probe)
drv->driver.probe = platform_drv_probe;
if (drv->remove)
drv->driver.remove = platform_drv_remove;
if (drv->shutdown)
drv->driver.shutdown = platform_drv_shutdown;
if (drv->suspend)
drv->driver.suspend = platform_drv_suspend;
if (drv->resume)
drv->driver.resume = platform_drv_resume;
return driver_register(&drv->driver);
}
从上面代码可以看出,在platform_driver中设置了probe, remove, shutdown, suspend或resume函数的话
则drv->driver也会设置成platform对应的函数
int driver_register(struct device_driver *drv)
{
int ret;
struct device_driver *other;
//检测总线的操作函数和驱动的操作函数是否同时存在,同时存在则提示使用总线提供的操作函数
if ((drv->bus->probe && drv->probe) ||
(drv->bus->remove && drv->remove) ||
(drv->bus->shutdown && drv->shutdown))
printk(KERN_WARNING "Driver '%s' needs updating - please use ""bus_type methods\n", drv->name);
//检测是否已经注册过
other = driver_find(drv->name, drv->bus);
if (other) {
put_driver(other);
printk(KERN_ERR "Error: Driver '%s' is already registered, “"aborting...\n", drv->name);
return -EEXIST;
}
//添加驱动到总线上
ret = bus_add_driver(drv);
if (ret)
return ret;
ret = driver_add_groups(drv, drv->groups);
if (ret)
bus_remove_driver(drv);
return ret;
}
int bus_add_driver(struct device_driver *drv)
{
struct bus_type *bus;
struct driver_private *priv;
int error = 0;
//取bus结构
bus = bus_get(drv->bus);
if (!bus)
return -EINVAL;
pr_debug("bus: '%s': add driver %s\n", bus->name, drv->name);
//分配驱动私有数据
priv = kzalloc(sizeof(*priv), GFP_KERNEL);
if (!priv) {
error = -ENOMEM;
goto out_put_bus;
}
//初始化klist_devices链表
klist_init(&priv->klist_devices, NULL, NULL);
//互相关联
priv->driver = drv;
drv->p = priv;
//设置私有数据的父容器,在这一步中,设置了kset为platform下的drivers_kset结构,也就是drivers呢个目录
priv->kobj.kset = bus->p->drivers_kset;
//初始化kobj对象,设置容器操作集并建立相应的目录,这里由于没有提供parent,所以会使用父容器中的kobj为父对象
error = kobject_init_and_add(&priv->kobj, &driver_ktype, NULL,
"%s", drv->name);
if (error)
goto out_unregister;
//检测所属总线的drivers_autoprobe属性是否为真
//为真则进行与设备的匹配,到这里,就会与我们之前注册的test_device连接上了,至于如何连接,进行了什么操作,将在别的文章中详细描述
if (drv->bus->p->drivers_autoprobe) {
error = driver_attach(drv);
if (error)
goto out_unregister;
}
//挂载到所属总线驱动链表上
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers);
module_add_driver(drv->owner, drv);
//建立uevent属性文件
error = driver_create_file(drv, &driver_attr_uevent);
if (error) {
printk(KERN_ERR "%s: uevent attr (%s) failed\n",
__func__, drv->name);
}
//建立设备属性文件
error = driver_add_attrs(bus, drv);
if (error) {
printk(KERN_ERR "%s: driver_add_attrs(%s) failed\n",__func__, drv->name);
}
error = add_bind_files(drv);
if (error) {
printk(KERN_ERR "%s: add_bind_files(%s) failed\n",__func__, drv->name);
}
kobject_uevent(&priv->kobj, KOBJ_ADD);
return error;
out_unregister:
kobject_put(&priv->kobj);
out_put_bus:
bus_put(bus);
return error;
}
到这里test_driver的模型就建立好了,图就是最上面的层次图,我就不再贴了
到这里一个基本的框架就建立起来了~
下面,我开始对kobject kset和ktype做分析
先说说关系,ktype与kobject和kset这两者之前的关系较少,让我画一个图,是这样的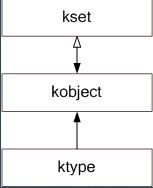
ktype依赖于kobject,kset也依赖于kobject,而kobject有时需要kset(所以用了一个白箭头),不一定需要ktype(真可怜,连白箭头都没有)
首先先说一下这个可有可无的ktype
到/sys/bus/platform下面可以看见一个drivers_autoprobe的文件
cat drivers_autoprobe可以查看这个文件的值
echo 0 > drivers_autoprobe则可以改变这个文件的值
drivers_autoprobe这个文件表示的是是否自动进行初始化
在
void bus_attach_device(struct device *dev)
{
struct bus_type *bus = dev->bus;
int ret = 0;
if (bus) {
if (bus->p->drivers_autoprobe)
ret = device_attach(dev);
WARN_ON(ret < 0);
if (ret >= 0)
klist_add_tail(&dev->knode_bus, &bus->p->klist_devices);
}
}
中可以看见这么一段代码
if (bus->p->drivers_autoprobe)
ret = device_attach(dev);
bus->p->drivers_autoprobe的值为真则进行匹配
而drivers_autoprobe这个文件则可以动态的修改这个值选择是否进行匹配
使用外部文件修改内核参数,ktype就是提供了这么一种方法
现在让我们看看ktype是怎么通过kobject进行运作的
首先是ktype及通过ktype进行运作的drivers_autoprobe的注册
ktype的挂载十分简单,因为他是和kobject是一体的
只有这么下面一句
priv->subsys.kobj.ktype = &bus_ktype;
这样就将bus_ktype挂载到了platform_bus_type的kobject上
drivers_autoprobe的注册如下
retval = bus_create_file(bus, &bus_attr_drivers_autoprobe);
bus_attr_drivers_autoprobe这个结构由一系列的宏进行组装
static BUS_ATTR(drivers_autoprobe, S_IWUSR | S_IRUGO,
show_drivers_autoprobe, store_drivers_autoprobe);
#define BUS_ATTR(_name, _mode, _show, _store) \
struct bus_attribute bus_attr_##_name = __ATTR(_name, _mode, _show, _store)
#define __ATTR(_name,_mode,_show,_store) { \
.attr = {.name = __stringify(_name), .mode = _mode }, \
.show = _show, \
.store = _store, \
}
最后bus_attr_drivers_autoprobe的模型如下
struct bus_attribute bus_attr_drivers_autoprobe
{
.attr = {
.name = “drivers_autoprobe”,
.mode = S_IWUSR | S_IRUGO
},
.show = show_drivers_autoprobe,
.store = store_drivers_autoprobe,
}
进入到bus_create_file中
int bus_create_file(struct bus_type *bus, struct bus_attribute *attr)
//参数为(bus, &bus_attr_drivers_autoprobe)
{
int error;
if (bus_get(bus)) {
error = sysfs_create_file(&bus->p->subsys.kobj, &attr->attr);
bus_put(bus);
} else
error = -EINVAL;
return error;
}
int sysfs_create_file(struct kobject * kobj, const struct attribute * attr)
//参数为(&bus->p->subsys.kobj, &attr->attr)
{
BUG_ON(!kobj || !kobj->sd || !attr);
return sysfs_add_file(kobj->sd, attr, SYSFS_KOBJ_ATTR);
}
int sysfs_add_file(struct sysfs_dirent *dir_sd, const struct attribute *attr,int type)
//参数为(&bus->p->subsys.kobj ->sd, &attr->attr, SYSFS_KOBJ_ATTR)
{
return sysfs_add_file_mode(dir_sd, attr, type, attr->mode);
}
int sysfs_add_file_mode(struct sysfs_dirent *dir_sd,
const struct attribute *attr, int type, mode_t amode)
//整理一下参数,现在应该为
//(&platform_bus_type->p->subsys.kobj ->sd, &bus_attr_drivers_autoprobe->attr, SYSFS_KOBJ_ATTR, &bus_attr_drivers_autoprobe->attr->mode)
{
umode_t mode = (amode & S_IALLUGO) | S_IFREG;
struct sysfs_addrm_cxt acxt;
struct sysfs_dirent *sd;
int rc;
//在这一步中可以看出新建了一个节点
sd = sysfs_new_dirent(attr->name, mode, type);
if (!sd)
return -ENOMEM;
//这一步挂载了&bus_attr_drivers_autoprobe->attr到节点中,为以后提取attr及上层结构做准备
sd->s_attr.attr = (void *)attr;
// dir_sd也就是上层目录,在这里为platform_bus_type->p->subsys.kobj ->sd
//也就是/sys/bus/platform这个目录
sysfs_addrm_start(&acxt, dir_sd);
rc = sysfs_add_one(&acxt, sd);
sysfs_addrm_finish(&acxt);
if (rc)
sysfs_put(sd);
return rc;
}
struct sysfs_dirent *sysfs_new_dirent(const char *name, umode_t mode, int type)
{
char *dup_name = NULL;
struct sysfs_dirent *sd;
if (type & SYSFS_COPY_NAME) {
name = dup_name = kstrdup(name, GFP_KERNEL);
if (!name)
return NULL;
}
sd = kmem_cache_zalloc(sysfs_dir_cachep, GFP_KERNEL);
if (!sd)
goto err_out1;
if (sysfs_alloc_ino(&sd->s_ino))
goto err_out2;
atomic_set(&sd->s_count, 1);
atomic_set(&sd->s_active, 0);
sd->s_name = name; //节点的名字为&bus_attr_drivers_autoprobe->attr->name 也就是drivers_autoprobe
sd->s_mode = mode;
sd->s_flags = type; //节点的type为SYSFS_KOBJ_ATTR
return sd;
err_out2:
kmem_cache_free(sysfs_dir_cachep, sd);
err_out1:
kfree(dup_name);
return NULL;
}
现在一切准备就绪,来看看怎么读取吧
首先是open,大概流程可以看我的另一篇文章<从文件到设备>,一直看到ext3_lookup
这里和ext3_lookup不同的是,sys的文件系统是sysfs文件系统,所以应该使用的lookup函数为sysfs_lookup(/fs/sysfs/dir.c)
static struct dentry * sysfs_lookup(struct inode *dir, struct dentry *dentry,
struct nameidata *nd)
{
struct dentry *ret = NULL;
struct sysfs_dirent *parent_sd = dentry->d_parent->d_fsdata;
struct sysfs_dirent *sd;
struct inode *inode;
mutex_lock(&sysfs_mutex);
sd = sysfs_find_dirent(parent_sd, dentry->d_name.name);
if (!sd) {
ret = ERR_PTR(-ENOENT);
goto out_unlock;
}
//节点的初始化在这里
inode = sysfs_get_inode(sd);
if (!inode) {
ret = ERR_PTR(-ENOMEM);
goto out_unlock;
}
dentry->d_op = &sysfs_dentry_ops;
dentry->d_fsdata = sysfs_get(sd);
d_instantiate(dentry, inode);
d_rehash(dentry);
out_unlock:
mutex_unlock(&sysfs_mutex);
return ret;
}
struct inode * sysfs_get_inode(struct sysfs_dirent *sd)
{
struct inode *inode;
inode = iget_locked(sysfs_sb, sd->s_ino);
if (inode && (inode->i_state & I_NEW))
//为节点赋值
sysfs_init_inode(sd, inode);
return inode;
}
static void sysfs_init_inode(struct sysfs_dirent *sd, struct inode *inode)
{
struct bin_attribute *bin_attr;
inode->i_blocks = 0;
inode->i_mapping->a_ops = &sysfs_aops;
inode->i_mapping->backing_dev_info = &sysfs_backing_dev_info;
inode->i_op = &sysfs_inode_operations;
inode->i_ino = sd->s_ino;
lockdep_set_class(&inode->i_mutex, &sysfs_inode_imutex_key);
if (sd->s_iattr) {
set_inode_attr(inode, sd->s_iattr);
} else
set_default_inode_attr(inode, sd->s_mode);
//判断类型
switch (sysfs_type(sd)) {
case SYSFS_DIR:
inode->i_op = &sysfs_dir_inode_operations;
inode->i_fop = &sysfs_dir_operations;
inode->i_nlink = sysfs_count_nlink(sd);
break;
//还记得在注册的时候有一个参数为SYSFS_KOBJ_ATTR赋到了sd->s_flags上面吧
case SYSFS_KOBJ_ATTR:
inode->i_size = PAGE_SIZE;
inode->i_fop = &sysfs_file_operations;
break;
case SYSFS_KOBJ_BIN_ATTR:
bin_attr = sd->s_bin_attr.bin_attr;
inode->i_size = bin_attr->size;
inode->i_fop = &bin_fops;
break;
case SYSFS_KOBJ_LINK:
inode->i_op = &sysfs_symlink_inode_operations;
break;
default:
BUG();
}
unlock_new_inode(inode);
}
sysfs_file_operations的结构如下,之后open和read,write都明了了
const struct file_operations sysfs_file_operations = {
.read = sysfs_read_file,
.write = sysfs_write_file,
.llseek = generic_file_llseek,
.open = sysfs_open_file,
.release = sysfs_release,
.poll = sysfs_poll,
};
有关在哪调用open还是请查阅我的另一篇文章<从文件到设备>中 nameidata_to_filp之后的操作
好的~ 现在进入到了sysfs_open_file中
static int sysfs_open_file(struct inode *inode, struct file *file)
{
struct sysfs_dirent *attr_sd = file->f_path.dentry->d_fsdata;
//要重的取值,在这里取得了drivers_autoprobe的目录platform的kproject
struct kobject *kobj = attr_sd->s_parent->s_dir.kobj;
struct sysfs_buffer *buffer;
struct sysfs_ops *ops;
int error = -EACCES;
if (!sysfs_get_active_two(attr_sd))
return -ENODEV;
if (kobj->ktype && kobj->ktype->sysfs_ops)
//这里可谓是ktype实现中的核心,在这里ops设置成了platform_bus_type中kobject->ktype的sysfs_ops
ops = kobj->ktype->sysfs_ops;
else {
printk(KERN_ERR "missing sysfs attribute operations for ""kobject: %s\n", kobject_name(kobj));
WARN_ON(1);
goto err_out;
}
if (file->f_mode & FMODE_WRITE) {
if (!(inode->i_mode & S_IWUGO) || !ops->store)
goto err_out;
}
if (file->f_mode & FMODE_READ) {
if (!(inode->i_mode & S_IRUGO) || !ops->show)
goto err_out;
}
error = -ENOMEM;
buffer = kzalloc(sizeof(struct sysfs_buffer), GFP_KERNEL);
if (!buffer)
goto err_out;
mutex_init(&buffer->mutex);
buffer->needs_read_fill = 1;
//然后将设置好的ops挂载到buffer上
buffer->ops = ops;
//再将buffer挂载到file->private_data中
file->private_data = buffer;
error = sysfs_get_open_dirent(attr_sd, buffer);
if (error)
goto err_free;
sysfs_put_active_two(attr_sd);
return 0;
err_free:
kfree(buffer);
err_out:
sysfs_put_active_two(attr_sd);
return error;
}
现在已经为read和write操作准备好了
马上进入到read操作中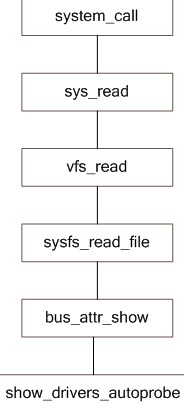
整个流程如上图所示,如何进入到sysfs_read_file在上面open的操作中已经说明了
我们就从sysfs_read_file开始分析(该文件在/fs/sysfs/file.c中)
sysfs_read_file(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{
struct sysfs_buffer * buffer = file->private_data;
ssize_t retval = 0;
mutex_lock(&buffer->mutex);
if (buffer->needs_read_fill || *ppos == 0) {
//主要操作在fill_read_buffer中
retval = fill_read_buffer(file->f_path.dentry,buffer);
if (retval)
goto out;
}
pr_debug("%s: count = %zd, ppos = %lld, buf = %s\n",__func__, count, *ppos, buffer->page);
retval = simple_read_from_buffer(buf, count, ppos, buffer->page,
buffer->count);
out:
mutex_unlock(&buffer->mutex);
return retval;
}
static int fill_read_buffer(struct dentry * dentry, struct sysfs_buffer * buffer)
{
struct sysfs_dirent *attr_sd = dentry->d_fsdata;
//取得父目录的kobject,也就是platform的kobject
struct kobject *kobj = attr_sd->s_parent->s_dir.kobj;
//还记得这个buffer->ops在什么时候进行赋值的么?
struct sysfs_ops * ops = buffer->ops;
int ret = 0;
ssize_t count;
if (!buffer->page)
buffer->page = (char *) get_zeroed_page(GFP_KERNEL);
if (!buffer->page)
return -ENOMEM;
if (!sysfs_get_active_two(attr_sd))
return -ENODEV;
buffer->event = atomic_read(&attr_sd->s_attr.open->event);
//调用ops->show 也就是bus_sysfs_ops->show 具体就是bus_attr_show了
//参数为父目录的kobject, bus_attr_drivers_autoprobe->attr,和一段char信息
count = ops->show(kobj, attr_sd->s_attr.attr, buffer->page);
sysfs_put_active_two(attr_sd);
if (count >= (ssize_t)PAGE_SIZE) {
print_symbol("fill_read_buffer: %s returned bad count\n",
(unsigned long)ops->show);
/* Try to struggle along */
count = PAGE_SIZE - 1;
}
if (count >= 0) {
buffer->needs_read_fill = 0;
buffer->count = count;
} else {
ret = count;
}
return ret;
}
现在进入bus_attr_show中
static ssize_t bus_attr_show(struct kobject *kobj, struct attribute *attr,char *buf)
{
//提取attr的上层结构,也就是bus_attr_drivers_autoprobe
struct bus_attribute *bus_attr = to_bus_attr(attr);
//提取kobj的上上层结构,也就是bus_type_private
struct bus_type_private *bus_priv = to_bus(kobj);
ssize_t ret = 0;
if (bus_attr->show)
//终于到了这里,最后的调用,调用bus_attr_drivers_autoprobe.show ,也就是show_drivers_autoprobe
//参数为bus_priv->bus,也就是platform_bus_type , 及一段char信息
ret = bus_attr->show(bus_priv->bus, buf);
return ret;
}
static ssize_t show_drivers_autoprobe(struct bus_type *bus, char *buf)
{
return sprintf(buf, "%d\n", bus->p->drivers_autoprobe);
}
没什么好介绍了就是打印 buf + bus->p->drivers_autoprobe 从结果来看~ buf是空的
到这里,终于把内核的信息给打印出来了,千辛万苦,层层调用,就是为了取得上层kobject结构,逆运算再取得kobject的上层结构
大家是否对kobject有所了解了呢?~
在对kobject进行介绍之前 还是先把write操作讲完吧 哈哈~
write操作和read操作重要的步骤基本是一致的,只不过在最后的调用中
static ssize_t store_drivers_autoprobe(struct bus_type *bus,
const char *buf, size_t count)
{
if (buf[0] == '0')
bus->p->drivers_autoprobe = 0;
else
bus->p->drivers_autoprobe = 1;
return count;
}
不进行打印而对内核的参数进行了修改而已
好~ 现在让我们来看看kobject吧
kobject的结构如下
struct kobject {
const char *name; //kobject的名字
struct kref kref; //kobject的原子操作
struct list_head entry;
struct kobject *parent; //父对象
struct kset *kset; //父容器
struct kobj_type *ktype; //ktype
struct sysfs_dirent *sd; //文件节点
unsigned int state_initialized:1;
unsigned int state_in_sysfs:1;
unsigned int state_add_uevent_sent:1;
unsigned int state_remove_uevent_sent:1;
};
kobject描述的是较具体的对象,一个设备,一个驱动,一个总线,一类设备
在层次图上可以看出,每个存在于层次图中的设备,驱动,总线,类别都有自己的kobject
kobject与kobject之间的层次由kobject中的parent指针决定
而kset指针则表明了kobject的容器
像platform_bus 和test_device的kset都是devices_kset
呢parent和kset有什么不同呢
我认为是人工和默认的区别,看下面这张图 ,蓝框为kset,红框为kobject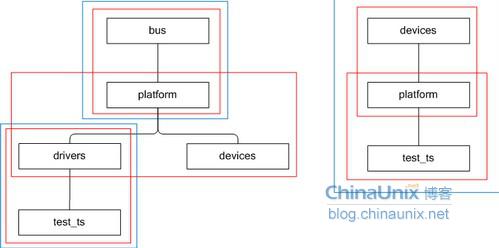
容器提供了一种默认的层次~ 但也可以人工设置层次
对于kobject现在我只理解了这么多,欢迎大家指出有疑问的地方
最后是kset,kset比较简单,看下面的结构
struct kset {
struct list_head list;
spinlock_t list_lock;
struct kobject kobj;
struct kset_uevent_ops *uevent_ops;
};
对于kset的描述,文档里也有介绍
/**
* struct kset - a set of kobjects of a specific type, belonging to a specific subsystem.
*
* A kset defines a group of kobjects. They can be individually
* different "types" but overall these kobjects all want to be grouped
* together and operated on in the same manner. ksets are used to
* define the attribute callbacks and other common events that happen to
* a kobject.
翻译过来大概就是
结构kset,一个指定类型的kobject的集合,属于某一个指定的子系统
kset定义了一组kobject,它们可以是不同类型组成但却希望捆在一起有一个统一的操作
kset通常被定义为回调属性和其他通用的事件发生在kobject上
可能翻译的不是很好,望大家见谅
从结构中能看出kset比kobject多了3个属性
list_head //列表
spinlock_t //共享锁
kset_uevent_ops //uevent操作集
list_head 连接了所有kobject中kset属性指向自己的kobject
而kset_uevent_ops则用于通知机制,由于uevent的作用我也没接触过,所以暂不解析uevent的机制了