CNET科技行者 9月4日 北京消息(文/周雅):如今的“智能家居”,已经做到了帮你从繁琐的家务事中解脱出来,但这还没达到真正意义上的智能。
反而是智能设备越来越多,越来越杂,甚至脱离不了人为手动操作...制约着智慧家庭的演进。一份埃森哲研究报告显示,24%受访者嫌弃智能设备太复杂,33%购买时会重点考虑操作简易性。
而iRobot技术副总裁Chris Jones在今年世界机器人大会直言,“智慧家庭,本质上就是一个大机器人。”iRobot在做智能机器人的时候意识到,机器人与智慧家庭的一些原则和技术类似。
如果你了解这家公司,就不难理解他为什么这么说。iRobot进入大众视线,源自于扫地机器人,2002年推出的世界上第一台扫地机器人轰动一时。然而在此之前的十余年,iRobot已经从事研发各型专用机器人(军用、警用、救难、侦测)——在它脍炙人口的历史大事记当中,iRobot机器人曾跑到“911攻击事件”的废墟里参与搜救工作,曾深入墨西哥湾油渍探测,也曾前往阿富汗战场进行扫雷及侦测敌方的行动,还曾考察埃及古金字塔......
尽管多年手握多条机器人业务线,但iRobot奉行术业有专攻,于是毅然决定将所有精力和资源都投入家用机器人这一个领域,以惠及大众生活。

iRobot技术副总裁Chris Jones
机器人要有“好奇心”
家居环境对于扫地机器人而言,那简直像一个森林,如果迷路就会被人类视为“太蠢”!所以它们起码得学会为自己导航、绕过障碍物、高效清洁。这是我们已知的部分。
而我们或许不知道,机器人还得很聪明。譬如,iRobot的扫地机器人可以发现家里的污垢,地图显示一些打叉的区域,就是污垢集中区,扫地机器人自动识别这些部分之后,会花更多的时间和力气反复清扫,就像人的行为一样。
我们或许更想弄清楚,它们到底还能表现得多聪明。在此之前,我们先得认识一下机器人如何工作,以及智慧家庭如何体现智慧。
关于机器人如何工作,Chris Jones的解读是:首先有感知,其次有行动,再就是会思考。
1、感知能力,可以理解周围的物理环境。譬如,iRobot的Roomba扫地机器人有很多传感器,碰到诸如“探测到障碍物的时候”、“碰到下坡要掉下去的时候”这些突发状况之前自己会预知。
2、行动能力。譬如,Roomba扫地机器人可以一边移动,一边根据它的任务和周围的环境调整轨迹,像是遇到墙边就会紧贴着墙边清扫。
3、思考能力。机器人考虑到所获信息和感知信息,然后跟它所要完成的任务结合起来,进行思考以后再采取行动。譬如Roomba 9,在清洁很大的房间时,如果电量快耗尽了,但清扫任务还没有完成,这个时候它就要问自己怎么回到充电的地方,心里会有一个地图,根据地图从所在的位置到回到充电的位置,然后执行这样一条路线,充电结束后,再返回之前的地方继续清扫。
除了“好奇心”,还要“会动脑”
从机器人工作模式,可以延伸到智慧家庭的打开方式。
一个智慧家庭之本,首先必须能够感知周围的环境,兼并足够的互联感应器,比如温度感应器、泄漏感应器、窗户感应器、IP摄像头等等,其次当然不能缺设备,这些目前市面上都已经实现。
问题就出在,智慧家庭不会真正地思考,它们是反应式的,仅仅把感应器和另外一个设备一一连接起来而已。
“理想中的智慧家庭,应该可以自主工作,通过感知居住者的需求来执行各种任务,此类智慧家庭建立在各种互联互通的机器人、传感器和智能设备之上,可以无缝响应人们的日常生活需求,创造出前所未有的舒适、便捷和安全的家居环境。”Chris Jones畅想。
具体而言,智慧家庭需要把所有的智能设备关联起来,进行宏观的思考和安排,就像在一个物理世界当中运行的机器人一样,必须能够提供一种你所希望的、为你而定制的、某个特定时段你所需要的一种服务。所以,智慧家庭如果要真正智慧的话,必须要学会“动脑子”。
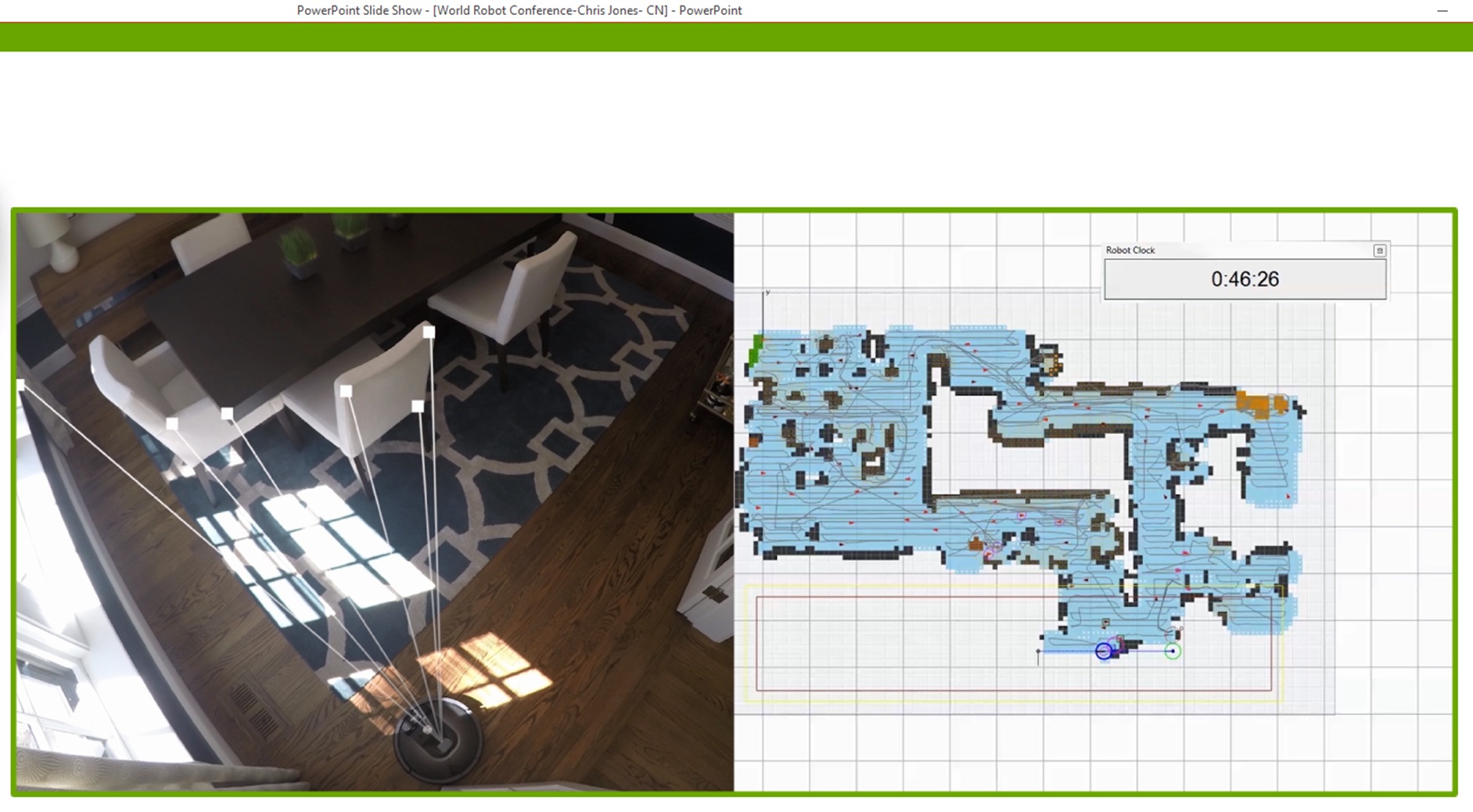
图左是机器人正在吸尘,图右是机器人构建家庭地图
如何思考?没有对物理空间环境的理解,智慧家庭中的智能设备就无法确定它们在空间上的关联性,从而无法以相互协调的方式自主运行,也就显得不够聪明。例如,你希望家中的运动传感器能够自动触发相关的灯具,那么这些运动传感器首先需要理解在各自的感知范围内,哪些灯具处于同一个连续空间。如果没有这种对空间的理解,消费者只有通过对设备之间的交互关系进行手动编程,才能实现期望的功能和效果。而当用户需要手动操作和管理数以百计的设备时,其可用性及可扩展性就无从谈起。
Chris Jones认为,机器人正是构造这种空间关联性的一个平台,因为它们能通过在室内的走动来创建家庭地图,并对其不断更新。更重要的是,机器人已经先行走入了当今的智慧家庭,这一重要基础,将有助于机器人在未来的智慧家庭中扮演更加独特和重要的角色。
这也是智能家居、人工智能之本——数据来源。譬如,今天iRobot的一些扫地机器人可以一边清扫,一边构建家庭地图,一边识别家庭里其它智能设备。如果使用者授权进行云连接,iRobot也可以把这些地图经过简化发到他手机App上,清扫结果一目了然。未来,这些收集的数据在获得使用者明确的授权后,也可以反馈给他家中其它的智能设备,完成设备互联。
之所以多次提到使用者授权,是为了强调数据的安全性。Chris Jones强调,机器人采集的数据只会存在于机器人本身,不会直接同步连接到云端,除非经过消费者授权上传,以追求更丰富的用户体验。
采访中iRobot技术副总裁Chris Jones、iRobot销售兼市场副总裁兼中国区总经理张莉详细解读了机器人的“智能”特性,以下为采访实录(经编辑):
问:智慧家庭环境里,您如何定义一个智能的扫地机器人?
张莉:iRobot产品从开发一直到推向市场上,都是基于对消费者的研究和了解,对iRobot来说怎么定义一个智能的扫地机器人呢?必须有三点做得好,清洁、聪明、简单。
1、它要足够聪明。家居环境不像一个广场、一个会议室那样空旷,而是很复杂的,有桌子、椅子、沙发、电线、犄角旮旯,此时要求扫地机器人足够聪明、像人一样反应,针对不同的情况提前反应并迅速做出决策。
所以它需要全套的感官(传感器)和聪明的大脑(复杂的算法)来模拟人的高智商行为。
我们想象一下,有时候人们自己在家清扫地面的时候,特别脏的地方扫一遍可能觉得不够干净,就再扫一遍,一直到他感官感受到干净了,才扫其他地方。机器人也一样,要给它感官上的理解,才能做到智能化的清扫。
iRobot全系Roomba系列扫地机器人就是这样“聪明”的机器人:当感知到强力污垢时,Roomba的Dirt Detect(污垢探测模式)会对该区域进行重点清洁;当感测到聚集在墙壁边缘和角落的灰尘时,Roomba会自动切换至边角清洁模式;在清洁狭窄区域时,Roomba会切换至脱困模式;在碰到线缆或地毯流苏时,Roomba则会切换至防缠绕模式。
![]()
iRobot Roomba 9系扫地机器人免缠绕清洁双主刷
![]()
iRobot边角清洁模式
这一切归功于Roomba搭载iAdapt 情景规划算法的多重模式自动智能切换技术,每秒可以做出超过60次决策,以适应不断变化的家居环境。
2、它要扫得足够干净。干净首先意味着要没有清洁死角——iRobot扫地机器人轻薄的设计确保它可以钻到家居下方清扫,遇到障碍物会尝试轻轻触碰,看看是否可以越过障碍物进行清扫。比如不会被垂落在床边的床单、被褥、窗帘迷惑 ,能够识破这些“障眼法”。
另外一个干净体现在清洁效率上。iRobot的Roomba 8系和9系扫地机器人配备革命性的三重高效清洁系统,经过专门设计,包括独特的旋转边刷、可反向旋转的两个清洁主刷、以及强劲的真空吸污能力,可以搅动、扫入并清除大多数类型地板上的污垢。边刷可以将碎屑从墙壁边缘和角落扫入机器人的清洁路径,可反向旋转的两个清洁主刷,可以搅动地板上的碎屑并将其扫起,以便强劲的真空吸尘装置将它直接吸入集尘盒。这一整套突破性清洁技术具有巧妙的“浮动”设计,可以灵活进行自身调节,保持与各种地面的紧密接触,确保机器人在家中行走时具备出色的清洁能力。
3、它用起来要足够简单。一个能称得上智能的机器人,使用起来一定要非常容易,消费者不需要做很多工作。比如iRobot,我们不需要用户把家具挪一挪、沙发搬一般,让它清扫的时候障碍少一些,这很麻烦。另一个简单的地方是“免维护”的特点。Roomba 8系和9系扫地机器人采用的是有胎纹的胶棒材质的双主刷,具有免缠绕毛发的特点,从而免了让很多消费者最头痛的后续清理维护的工作。
还有一个简单的特点是,iRobot今年5月全新推出的具备智能互联功能的Roomba扫地机器人,配备有支持安卓及iOS系统的iRobot HOME应用程序,可以直接在智能手机上控制扫地机器人。
问:iRobot机器人分成扫地机器人系列和擦地机器人系列,可能市场上很多产品这两个功能是合二为一的,您怎么看待扫擦分离这个问题?
Chris Jones:现在市场的确很多扫擦二合一的产品,然而以iRobot将近30多年的研发经验而谈,扫擦二合一,就不得不在某些功能上打折扣,肯定一些功能会出现短版,需要牺牲一些功能才能把两者整合起来。如果想既扫又拖,地面肯定是湿的,地面湿灰尘就会粘在上面,吸尘的效果肯定要差一些,拖地拖得也不痛快。
还有一个很好的例子,有时候家里面空间不是那么大,可能你并不需要机器人太高的型号,如果是二合一的话,意味着体积上一定要有折中,集尘的垃圾箱肯定不能太大,喷水的小水箱也不能太大,这样让机器人在两种功能上都发挥不到极致,都存在一定的短版。
这不是iRobot对于产品设计的理念,要想把好的用户体验传达给使用者,你要在单一任务上做到极致,确保它把这个价值链完整地诠释和体现。
问:现在vSLAM技术(基于视觉信息的移动机器人同步地图创建与定位)比较火,iRobot这方面运算技术极具优势,请问您如何看待路径规划方面技术的发展趋势?
Chris Jones:在整个导航系统当中,我们常规的理解核心是摄像头,摄像头视觉信息的采集是导航的核心,但是我们的产品独特之处不单纯是视觉导航这一个部件,是整个系统所有传感器协同工作、互相协同的综合性的工作状态,才使得它有更智能的行动模式的选择。比如说iRobot9系扫地机器人轮子里设置了轮胎里程计,这个传感器可以配合着其他的传感器进行智能路线的选择。所有这一切帮助机器人更智能地识别目前所处状态,这些都体现了iRobot产品的智能。
进一步角度来讲,把视觉摄像头比喻成眼睛,如果被遮盖住、身处暗处,机器人在其他传感器的配合下也不会迷失方向,也可以很好地进行路线选择,高效地进行清洁工作。
生活中还会经常出现“机器人被绑架”的情况。比如它工作过程中,被人为地拿起来放到另外一个地方,iRobot机器人在多重传感系统的配合之下,会很智能地识别原来清扫到哪里,还能回去继续完成清扫工作。因为通过传感器它已经对周边的环境建立了真实、完整的理解。
原文发布时间为:2017-9-4
本文作者:周雅