5.21 人工智能研究的创新机遇
在了解了人工智能的涵义、释义、意义之后,人们可以抛开怀疑和担心,认真思考如何发展人工智能的问题。为此,需要在以上概念的基础上进一步了解人工智能科学技术研究的现实状况、存在问题和发展走向。
当前,人工智能的技术研究表现在许多热点方向,例如语音识别、图像处理、各种各样的人机竞赛、无人汽车和无人飞机、服务机器人应用、智能助理、智能硬件等,五光十色,眼花缭乱,但是笔者认为,在这目不暇接的技术万花筒背后,更值得深入思考的是人工智能的理论研究问题。因为,当前人工智能理论的“鼎足三分”状态,会成为人工智能研究进一步发展的制约,而这种状态的突破则将引领人工智能技术的更大发展。
4.1 现有的人工智能理论
如前所说,人工智能研究的目的是希望揭示人类智能(人类的显性智慧)的奥秘并在机器上模拟实现,从而制造智能机器。因此,对于人工智能的理论研究来说,核心问题就是如何实现人类智能的模拟。迄今,已经建立 3 种不同的智能模拟方法。
1)第 1 种方法是从 1943 年开始的“结构模拟”方法。这种方法认为,人类智能主要定位在人类大脑的大脑皮层(见图 1),因此,只要模拟出人类大脑皮层的结构,人工智能就成功了。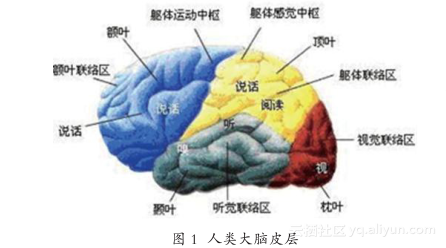
脑神经科学的进一步研究发现,人类大脑皮层由大约 10 10 个神经元组成,其中的神经元都是某种非线性处理单元,而且,每个神经元都与大约 10 3 ~10 4 个其他神经元相连,构成大规模非线性的生物神经元网络,神经元之间的连接强度可以调节。图 2 为大脑神经元及其互联的简化示意。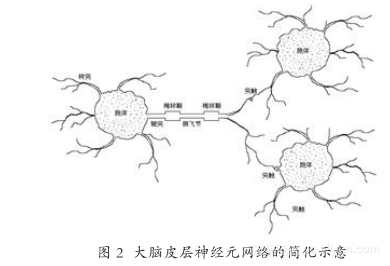
于是,基于结构模拟的人工智能理论认为,为了模拟人类大脑皮层所支持的智能,应当构造和研究大规模非线性的人工神经元网络。图 3 为两种简化的人工神经网络模型,左边是前向网络模型,它的信息只允许从输入端流向输出端;右边是反馈型网络模型,它的(全部或一部分)输出可以反馈到输入端,形成递归的非线性动力学系统。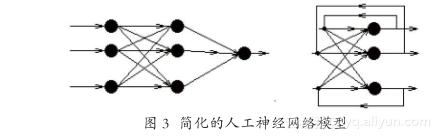
基于结构模拟的人工智能(人工神经网络)的原理是:在投入工作之前需要对人工神经网络进行训练,以便学习到求解问题所需要的经验知识(表现为各个神经元之间的连接权重),从而解决相应的问题。
这种研究取得了不少进展,在模式识别这类形象思维领域有相当出色的研究成果。目前颇受学术界关注的深度神经网络(deep neural network)和基于深度神经网络的深度学习(deep learning)就是这一方法的最新发展,但是这种方法存在两大问题:一方面是神经网络规模的问题,如果按照大脑神经网络规模设计人工神经网络,复杂性太高,工业上不容易实现,如果减低规模,则大部分智能能力将被丢失;另一方面,即使按照大脑神经网络的结构实现了人工神经网络,也只是完成了它的硬件设计,更重要的软件机制(即神经网络的工作机制)却还没有完全掌握。基于结构模拟的人工神经网络方法面临的这些难题,导致了新的人工智能研究方法的出现。
2) 第 2 种方法是 1956 年出现的“功能模拟”方法。这种方法认为,人类大脑的功能和计算机的功能等效(称为“物理符号假设”,其实并不等效),因此可以用计算机来模拟人类的智能(当时主要关注的是人类的逻辑思维能力),智能模拟的问题于是可以退化为计算机的智能软件编写问题。这是 McCarthy等 1956 年在 Dartmouth 举行的暑期学术研讨会形成的认识,并且明确把这种功能模拟的人工智能研究方法正式定名为人工智能(artificial intelligence,AI)。当时的研究者们对功能模拟的人工智能研究方法寄予极高的希望,认为这种方法几乎无所不能。 最具典型意义的是,Simon 和 Newell 等提出了面向几乎一切问题的“通用问题求解软件(general problem solver,GPS)。由于求解通用问题所需的知识难以界定和难以获取,后来便退回到了比较现实的情况:只需要专门领域知识 支持的“专家系统(expert systems)”。这种专家型人工智能系统的典型模型如图 4 所示。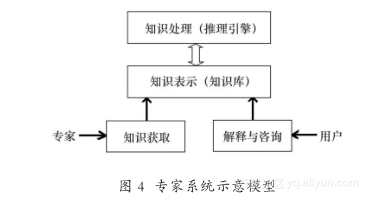
研究的核心问题是:必须具有解决问题所需要的知识,这是有关专门领域专家所具备的知识。通常由专家系统设计者通过访问该领域的专家获得,然后把获得的专家知识表示为特定的形式存储在知识库内供推理引擎根据推理需要而使用。用户的咨询问题也要表示为特定的形式,以便推理引擎理解。另一方面,推理引擎系统针对咨询问题所得到的答案(表示为特定的形式)需要翻译为用户所熟悉的表达形式提供给用户。
基于功能模拟的人工智能系统取得了许多重要的进展,前面提到的国际象棋博弈系统 Deep Blue 和围棋博弈系统 AlphaGo 都是专门领域的专家系统,但是由图 4 的专家系统模型可以看出,功能模拟方法也存在一些问题。一方面,专家系统高度依赖于专门领域知识,而知识的获取、表示、推理都面临着许多困难,例如,专门领域知识并没有清晰的领域边界,知识往往都是交叉渗透的,实际上不同专家对同一领域知识的认识也不完全相同;另外,手工获取知识的效率极低而自动获取知识的方法又还远未成熟;知识表示和推理所依赖的逻辑理论(标准逻辑和非标准逻辑理论)能力非常有限等。由此可见,专家系统的发展有可能遭遇到相当严重的“知识瓶颈”障碍。另一方面,功能模拟所宣称的计算机“功能”其实和人类智能系统的“功能”并不等效,因为,当代计算机系统只具有形式逻辑运算功能,而不具备人类智能系统的情感功能和意识功能。
结构模拟和功能模拟方法遭遇到的这些困难,都不是轻而易举就能克服的。这种情形迫使人工智能研究者们不得不寻求新的途径。
3)第 3 种方法是 1990 年前后开始的“行为模拟”方法。寻求新出路的人工智能研究,希望能够避免结构模拟和功能模拟方法所遭遇到的困难。于是走向了“行为模拟”的途径。所谓行为模拟,就是模拟“当系统面临某种外来刺激的时候,系统能够产生恰当的行动予以应对”这种能力。这就是感知 - 动作系统的基本思想,其原理模型如图 5 所示。
基于行为模拟的人工智能系统的特点是:拥有很强的模式分类能力,当系统面对外来刺激时,它能识别这个刺激的类型;一旦确定了外来刺激的类型,系统就通过“刺激 - 响应”的对应关系(实际就是一组常识型的知识)启动相应类型的动作予以响应。这就模拟了作为智能系统的人类的一些行为,例如,一旦识别室内的光照属于“强亮度”类型(亮度高于某个阈值),就启动“关灯”的动作;反之,一旦识别室内光照属于“弱亮度”类型,就启动“开灯”的动作;如此等等。
基于行为模拟的人工智能研究也获得了不少成果,当今在许多场合工作的机器人就是按照这种方法设计的,它们能够针对确定的刺激(包括语言刺激和视觉刺激)类型产生对应的动作(包括语言和动作的回应)。
如果将图5与图3、图4进行对比,就可以看出,基于行为模拟的人工智能研究方法确实可以回避“结构复杂” 和“知识瓶颈”的困难,但是这种方法自身至少也存在一种颇为严重的局限,这就是:它只能模拟比较简单的而且是外显的智能行为,而对那些深刻思维过程中的智能将无能为力。
4.2 现有人工智能理论的问题和出路
现有人工智能理论虽然精彩纷呈,然而如上所述,3种模拟理论和方法各有各的问题。特别令人遗憾的是,既然 3 种模拟方法的目标都是要模拟人类智能,为什么 3 种模拟方法之间却总是各持己见,互不相容,至今未能形成统一的人工智能理论?
殊途不能同归,3 种理论不能互相沟通,不能形成统一理论,这不是无足轻重的小问题,而是人工智能理论研究存在重大的方法论问题。继续沿着已有的 3种理论方法前进还可以分别获得新的技术进展,但在形成统一的人工智能理论方面并无直接帮助。发现了问题,就找到了解决问题的出路。这就是:应当重新审视现有人工智能研究科学方法论的正确性。
4.3 新的方法论和新的人工智能理论
由于受到近代物质科学研究方法论的长期熏陶,“还原论(分而治之)”已经成为大多数西方学者的思维定式:在面对复杂问题的时候,他们习惯于把它分解为若干相对简单的子问题,认为只要把所有子问题解决了,复杂的母问题就自然解决了。几百年来,这种方法论在物质科学研究中畅行无阻,屡试不爽。而在以信息为主导因素的人工智能理论研究中,“分而治之”方法论遭遇了挫折:复杂信息系统被分解之后,各子系统之间的信息联系便被切断并被丢失掉了,这样即使各子系统的“问题解决了”,它们却无法还原为原来的母系统。
最典型的例子是人脑研究。人们曾经希望利用成熟的医学解剖方法弄清大脑的物质结构,从而探索人类思维的奥秘。然而,大脑是一个具有极为错综复杂的信息联系和极为复杂的信息转换过程的系统,把大脑分解开来之后,脑的各个部分的信息联系和思维过程便被破坏了,失去了丰富信息联系的各个大脑碎片无论如何也不可能还原成原来鲜活的大脑!
因此,对于人工智能和人类智能系统的研究,首先需要强调,沿用分而治之的方法把智能系统分解为系统结构、系统功能、系统行为来研究确实难以合成还原,人们应当改变观念,努力抓住能够“统揽系统全局本质”的整体性特征进行研究。这就启示人们,人工智能的研究应当放弃“还原论”的方法论,转而采用“系统论”的方法论。
与此同时,还要强调:无论是人类智能还是人工智能系统,都不是某种固定的以不变应万变的万能系统,相反,它们都是一类鲜活的系统,都是要根据当时实际面临的问题信息、针对特定的工作目标、运用相应的领域知识、在目标引导下由信息生成知识再由知识生成策略一步一步地“生长出”问题求解策略的工作系统。这就表明,人工智能的研究应当坚持“生态演化论”的方法论。那么,什么是能够“统揽智能系统全局本质而又具有生态演化性质”的整体性特征呢?显然,这只能是根据面临的具体问题而生成解决该问题所需智能策略的“智能生成机制”,它不是静态的系统结构,不是系统的某一组功能,也不是系统的表面行为。事实上,系统的结构和功能都是为实现智能生成机制提供服务的,而系统的行为则是实现智能生成机制所产生的外在表现。
可以认为,只要建立了系统的“智能生成机制”,那么,根据给定的具体问题、针对预定的工作目标、运用相关的知识,就可以按照“智能生成机制”生长出解决这个问题的智能(解决问题的策略)。至于采用什么结构,需要哪些功能,都应当根据智能生成机制的需要来确定。
所以,按照“生态系统演化”方法论,只有“智能生成机制”才是研究一切人类智能和人工智能系统应当牢牢抓住的全局性本质特征。模拟人类智能系统生成智能的奥妙就是要模拟它的“智能生成机制”。
研究发现,智能生成机制可以用图 6 来描述。它是人类智能系统的智能生成模型,也是人工智能模拟人类智能生成的模型。
图 6 表明,智能生成机制具体表现为“本体论信息→认识论信息→知识→智能策略→智能行为的转换。其中,本体论信息是外部环境产生的信息,认识论信息是人类智能系统从本体论信息转换出来的信息,知识是人类认知系统从认识论信息中提炼出来的共同本质,智能策略就是在认识论信息刺激下,在相关知识的支持下,在目标的引导下,经由基础意识、情感、理智、决策综合生成的“智能”,智能行为则是执行系统由智能策略转换而来的行为表现。这是人类与外部世界相互作用的完整信息过程。
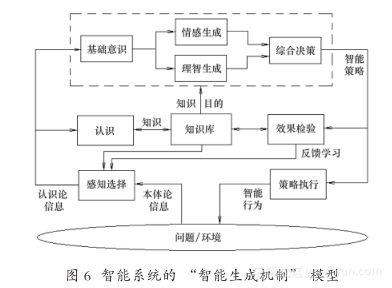
以上所描述的智能生成机制也可以简写为“信息→知识→智能”转换。它是一切智能系统生成智能的共性核心机制。当然,对于复杂程度不同的智能系统,它们的信息内容、知识内容、智能内容都各不相同,转换的复杂程度也各不相同,但是,“信息→知识→智能”转换这个生成智能策略的“范式”是一样的。
根据这一发现,就可以顺理成章地建立“基于机制模拟的人工智能理论”。这就意味着,只要给定“问题的信息、预期的问题求解目标、问题求解的相关知识(注意:这三者正是“隐性智慧提供的问题求解工作框架”)”,原则上就可以通过相应的转换生成求解问题的智能策略和智能行为,解决问题,达到目标。
颇有意义的是,基于机制模拟的人工智能理论不仅是一种全新的人工智能理论,而且,它还把以往数十年来互相鼎足而立的三大人工智能理论(基于结构模拟的人工神经网络理论、基于功能模拟的专家系统理论、基于行为模拟的感知动作理论)有机和谐地统一起来了,如表 1 所示。这对于人工智能理论的发展具有重要意义。