OpenSceneGraph 场景节点
一、OSG场景节点简介及组合模式介绍
OSG中的场景是树形结构表示的层次结构,如下图所示:
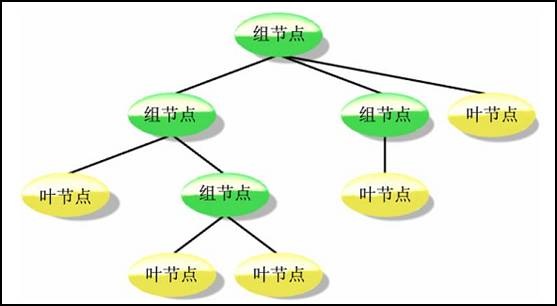
Figure 1.1 OpenSceneGraph场景树形层次结构
根据其源码中的注释得知,OSG中场景节点的管理采用了组合(Composite)模式。先简要介绍一下组合模式,其类图为:
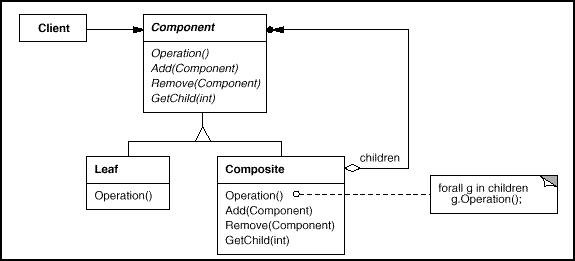
Figure 1.2 Composite Pattern's Structure
使用组合模式的目的是为了将对象合成树形结构以表示“部分—整体”的层次结构。Composite使得用户对单个对象和组合的使用具有一致性。组合模式通常用于以下情况:
l 你想表示对象的部分—整体层次结构;
l 你希望用户忽略组合对象与单个对象的不同,用户将统一地使用组合结构中的所有对象;
为了达到叶子节点与组合节点的一致性,也可以给叶子节点定义与组合节点一样的操作,但是这些操作什么也不做,与引入Null Object模式类似,这里引入Null Operation。
组合模式中主要的参与者有三个:
l Component
n Declares the interface for objects in the composition;
n Implements default behavior for the interface common to all classes, as appropriate;
n Declares and interface for accessing and managing its child components;
n (optional)Defines an interface for accessing a component's parent in the recursive structure and implements it if that's appropriate;
l Leaf
n Represents leaf objects in the composition. A leaf has no children;
n Defines behavior for primitive objects in the composition;
l Composite
n Defines behavior for components having children;
n Stores child components;
l Client
n Manipulates objects in the composition through the Component interface.
二、OSG中组合Composite模式的应用
根据OSG的文档得到其场景节点的类图,如下图所示:
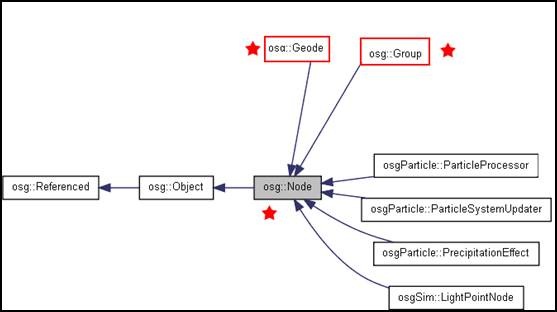
Figure 1.3 Inheritance Diagram for osg::Node
结合红星标示出的三个类:osg::Node、osg::Geode、osg::Group来讲述组合模式的具体应用。以下为声明类osg::Node时给出的注释:
/** Base class for all internal nodes in the scene graph.
Provides interface for most common node operations (Composite Pattern).
*/
即osg::Node类为所有场景图形的基类,为大多数能用节点操作提供接口,采用提组合模式。
以下为声明类osg::Geode时给出的注释:
/** A \c Geode is a "geometry node", that is, a leaf node on the scene graph
* that can have "renderable things" attached to it. In OSG, renderable things
* are represented by objects from the \c Drawable class, so a \c Geode is a
* \c Node whose purpose is grouping <tt>Drawable</tt>s.
*/
即osg::Geode类是一个几何节点,即场景节点中的一个叶子节点,可以把可渲染的东西绑定在它上面。在OSG中,可渲染的东西表示为由类Drawable生成的对象。所以,一个Geode目的就是使Drawable成组。具体实现的程序代码为:
typedef std::vector< ref_ptr<Drawable> > DrawableList;
保护成员变量:
DrawableList _drawables;
以下为声明类osg::Group时给出的注释:
/** General group node which maintains a list of children.
* Children are reference counted. This allows children to be shared
* with memory management handled automatically via osg::Referenced.
*/
即osg::Group节点维护一个孩子表,孩子是引用计数的。这样就可以由内存管理机制来管理这些孩子。具体实现的程序代码为:
typedef std::vector< ref_ptr<Node> > NodeList;
保护成员变量:
NodeList _children;
综上所述,得出它们的类图:
Figure 1.4 OSG Node Class Diagram
由类图可知,这个类图与图1.2所示的组合模式的类图相似。其中,类osg::Node可以看成是Component类,为所有的场景节点的通用操作声明接口;osg::Geode类可看作Leaf类,是一个具体的可渲染的场景节点;osg::Group类可看作Composite类,它可以包含叶节点或其它节点。
三、程序示例
编程实现由多个模型来构成一个场景,为了简便起见,模型由文件得到。场景的树形层次结构如下图所示:

Figure 1.5 Add More Models to Scene Graph
程序代码如下:
//--------------------------------------------------------------------------
// Copyright (c) 2012 eryar All Rights Reserved.
//
// File : Main.cpp
// Author : eryar@163.com
// Date : 2012-1-3 20:58
// Version : 1.0v
//
// Description : Add more models to the Secne.
//
//==========================================================================
#include <osg/Node>
#include <osgDB/ReadFile>
#include <osgViewer/Viewer>
#include <osgViewer/ViewerEventHandlers>
int main(int argc, char* argv[])
{
osgViewer::Viewer viewer;
osg::ref_ptr<osg::Group> root = new osg::Group;
osg::ref_ptr<osg::Group> group = new osg::Group;
root->addChild(osgDB::readNodeFile("glider.osg"));
group->addChild(osgDB::readNodeFile("osgcool.osgt"));
group->addChild(osgDB::readNodeFile("axes.osgt"));
root->addChild(group);
viewer.setSceneData(root);
viewer.realize();
viewer.addEventHandler(new osgViewer::WindowSizeHandler);
viewer.addEventHandler(new osgViewer::StatsHandler);
return viewer.run();
}
程序效果图如下图所示:
Figure 1.6 Render OSG Node
PDF Version