2.9 国内外研究现状
腿式机器人的研制
从上世纪 50 年代开始,各国科学家开始致力于腿式机器人的研究,希望在借鉴腿式动物的骨骼结构、肌腱驱动、运动特点和控制模式等基础上,研制出运动能力强、环境适应性好和能量效率高的腿式仿生机器人。
在双足机器人研究领域,目前最具代表性的双足机器人主要集中在日本和美国。日本本田公司2000 年发布了双足机器人 ASIMO [1] ,其最新版本身高 130 cm,体重 48 kg,最高运动速度 9 km/h,可以步行、奔跑、跳跃,甚至上下楼梯和微不平整地面行走,尽管离实际的应用还有一定距离,但其有关双足机理的研究成果已成功应用在智能假肢上。2010 年,由美国 DARPA 资助,波士顿动力公司为主开发的液压驱动双足机器人 Petman [2] ,身高和正常人差不多,可以像人一样实现脚跟着地式行走,最高行走速度可达到 5 km/h,可以实现在手臂辅助下上楼梯、高处稳定落地等动作,特别是这款机器人还具有很好的平衡性,可以在高速行走时受外力推挤而不会失去平衡。2013 年,在 Petman研制的基础上,波士顿动力公司又开发了更先进的双足机器人 Atlas [10] ,高 180 cm,体重 150 kg,专为各种搜索及救援任务而设计,配备了激光测距仪、立体照相机两个视觉系统和两只液压驱动的手臂,可以在崎岖的地形行走和在手臂的辅助下攀登楼梯,还可以通过手臂摆动实现侧向的抗扰动平衡控制。最新研究还展示在森林中的崎岖地面上行走的情形[3] 。2013 年,日本 Schaft 团队研制的电机驱动双足机器人 Schaft [19] ,高 1.46 m,重 98 kg,几乎完成了 DARPA 机器人挑战赛的所有任务,并最终夺冠,尤其是在爬梯、废墟行走和移除障碍物项目上表现十分出色。以上四款顶级水平的双足机器人,除了 ASIMO 自带能源之外,其他三款机器人均需外接线缆提供能量。以上机器人如图 1 所示。

在四足机器人研究领域,最先进的四足机器人当属波士顿动力公司开发的几款四足机器人。2006年,波士顿动力公司在 DARPA 资助下开发了第一代高动态的液压驱动四足机器人 BigDog [4] ;2008年,其又开发了第二代 BigDog [5] ,全身共有 16 个主动关节,最高速度 7 km/h,最大负载能力 154kg,以对角小跑步态为主,可实现不同步态的行走和步态之间的转换,攀爬 35°的斜坡,在砂石、雪地等路上行走,翻越由砖头堆积的障碍路面,具有很强的运动灵活性和环境适应性。2011 年,波士顿动力公司又开发四足机器人 LS3 [6] ,该机器人可伴随步兵在野外环境下携带武器和其他物资,支持慢走、快走、奔跑和跳跃等运动模式,可跨越障碍物和沟渠,头部装有激光雷达和立体视觉系统,具有对环境的自主感知与智能决策能力。2014 年,最新一代的 LS3 作为美军海军陆战队的运载装备,参加了环太平洋军演,相比 BigDog,LS3 在抗扰动能力、环境适应性和负重能力等方面得到了更大的突破。2012 年,波士顿动力公司开发了四足机器人Cheetah [7] ,借鉴猎豹的柔性脊柱与快速奔跑方式,在身体部分增加额外的驱动关节,在辅助支撑和外接能源的情况下,运动速度达到了47 km/h,成为迄今为止速度最快的腿式机器人。2013 年,波士顿动力公司又发布了 Cheetah 的进化版 WildCat [8] ,可以在平地上高速奔跑、转弯,但是它的油箱只能提供 5 分钟的动力。2014 年 9 月,MIT 仿生机器人实验室(Biomimetics Robot Lab)的研究人员发布了一款名为“Cheetah-bot” 的电驱动仿生四足机器人[20-21] ,在脱离外部能量源的情况下,该机器人的奔跑速度能够达到 16 km/h,甚至可以在奔跑过程中跳跃翻越障碍物。2015 年 2 月,谷歌旗下的波士顿动力公司展示了一款最新的机器人 Spot [22] ,是 WildCat 的缩小版,重量约 160 磅,通过电液混合的方式进行驱动,采用电池供能,可以实现快速行走和跑步,在噪声上相比纯液压驱动的机器人具有明显改善。这些机器人如图 2 所示。

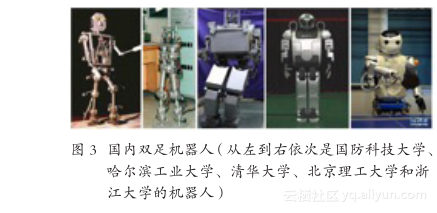
国内双足机器人方面,国防科技大学[10] 、哈尔滨工业大学[12] 、清华大学 [13] 、北京理工大学 [11] 、浙江大学[9]等先后开展了双足机器人(见图 3)的研究,浙江大学在 2011 年研制的乒乓球对弈仿人机器人可以 1.12 km/h 速度在室内稳定行走。
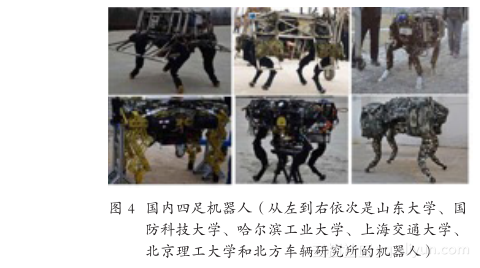
四足机器人方面,山东大学在 2010 年研制了国内首台液压驱动的四足机器人 Scalf-1 [14] ,实现了 trot 步态行走,最高速度达到 4.3 km/h。 在国家“863”计划项目资助下,国防科技大学、哈尔滨工业大学、上海交通大学和北京理工大学也分别开发了各自的液压驱动、能量自给的四足机器人(见图 4),可以在不同地形环境下行走。2014 年 9 月,北方车辆研究所在中国国际应急救灾装备技术展览会展出了其研制的山地四足仿生机器人,主要用于山地及丘陵地区的物资背负、驮运和安防。机器人自重 130 kg,任务搭载能力 50 kg,平整路面最大行驶速度 6 km/h,克服斜坡 30°,续航能力 2 h。
总体来讲,目前腿式机器人尽管在运动性能、平衡控制等方面已经实现了巨大突破,但受制于能耗问题,目前还很难在实际场合应用。LS3 四足机器人能够进行军演的主要原因之一是由于该机器人尺寸较大,可以携带更多燃油,提高了机器人的续航能力,但由于其发动机的运行会带来较大的噪声,项目将面临被裁掉的危险。我国在腿式机器人领域的研究与国外先进技术相比还有较大差距,在机构、驱动、建模方面的研究处于跟踪状态。高能效研究需打破原有的机构、驱动设计和建模规划方法,其研究成果也将进一步推动样机研制和运动速度与稳定性的提高。因此,我国应尽快开展腿式机器人高能效方面的研究,在基础理论和共性关键技术方面取得突破,推动我国新型腿式机器人的发展和应用。
腿式动物的能效研究
动物学、生物力学等专家对腿式动物的运动和能效进行了广泛的研究和分析,认为腿足动物关节的弹性机制、脊柱柔性机制、脚掌柔性结构和步态运动特征对动物的高能效运动起到了关键作用。
(1) 弹性机制方面:1988 年,英国著名动物学 家 Alexander 发 表 了“Elastic Mechanisms inAnimal Movement” [23] ,指出奔跑、跳跃动物的腿都具有非常好的弹性,腿上的肌腱可以吸收和储存脚与地面接触冲击时释放的能量。同时,腿上肌腱的力学特性能够实时调整以改变关节的弹性特性,不但能避免身体振动对生物体器官冲击带来的损伤,还能把所存的能量在需要时释放出来,有效降低整体能耗。Juergen [24] 也指出,由于腿部关节弹性的实时可调,人和腿式哺乳动物可以保持平稳的高效灵活运行,并能根据周围非结构化的环境随时调节运动姿态和运动频率。Ker 等人[25]在 Nature上刊文指出人的脚掌足弓类似一个被动的板簧,可以在跑步过程中有效储存和释放能量,储释能转换效率可达 70%,对人类高速运动时高能效的实现至关重要。Geyer [26] 、Alexander [27] 等在对袋鼠研究时发现,在袋鼠的跳跃步态中,肌腱和韧带属于被动柔性机构,可储存和释放部分的跳跃能量;而肌肉属于主动柔性机构,能产生并提供克服变化的肌腱应力和补偿不可避免的能量损失所需要的动力。
(2) 柔性机制方面:跑跳速度快的动物在高速奔跑或跳跃过程中存在背屈的现象,此时背部的柔性脊柱起储存和释放能量的作用,由此有效降低运动能耗。Hildebrand [28] 通过对印度豹的奔跑姿态分析研究指出,印度豹在快速奔跑时存在很明显的背屈,但在小跑时就不存在这个现象。这个结论已被普遍地用来解释和比较不同动物在高速奔跑时的能量优势。Gefen [29] 等人则研究指出猫科动物的柔性脚掌肉垫虽没有明显的储释能力,但其高阻尼的力学特性,使其可以通过能量的被动耗散,来防止过大的地面峰值反力与冲击振动可能引起的脚掌瞬时离地现象,而这种能量的被动耗散可以有效减少关节主动控制柔顺着地的能耗。
(3) 步态运动方面:Mann [30] 等人指出人在行走过程中,膝关节一直处于“伸直”状态,支撑腿整体呈现较强的刚性,此时人体运动的动能和重力势能可以高效的不断相互转化,以实现慢速运动时的高能效;而在高速运动时,人会自然切换到膝关节弯曲的跑步状态,以充分发挥各柔性关节的驱动、储能和释能能力。同样,四足哺乳动物具有多种步态(步行、对角小跑、跳跃步态、奔跑),但是在不同运动速度下会选择不同的步态[31-32] 。研究人员发现这与运动能效密切相关,每种步态都对应着一个速度区间,以获得最佳的能量利用率。此外,研究发现人类在高速奔跑时,摆动腿膝关节会自然呈现大角度的屈伸。一方面,可以充分利用被动动力学特性,降低膝关节的驱动要求;另一方面,膝关节的大角度弯曲可以减小摆动腿相对髋关节的转动惯量,以减小髋关节的驱动要求。
以上研究为腿式机器人的仿生设计提供了良好的基础,但如何进行有效的仿生设计仍然是机器人领域研究者面临的难题。现有的研究主要是对运动表象的定性总结,未能对能量传递、耗散、回收等机制缺乏全面系统的了解和量化评估,从而在仿生设计时缺少指导性依据。
腿式机器人的高能效方法
目前提高腿式机器人运动能效的方法主要有被动行走、运动优化、增加弹性或柔性材料、弹性或柔性驱动 4 种。
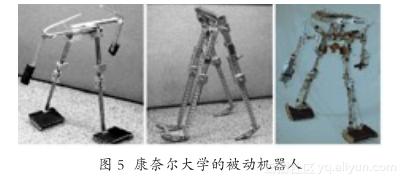
(1) 被动行走方面:McGeer [33] 研制了纯被动的双足机器人,完全依靠重力作用在下坡斜面上实现行走。基于类似原理,康奈尔大学研制了三维被动行走机器人[34] ,实现在斜面上的三维稳定行走,如图 5 所示。为了实现平地上的行走,很多研究人员开始尝试在被动行走机器人中加入简单驱动。康奈尔大学[35]通过在两个踝关节处加入电机和弹簧组成的驱动器,实现了 0.44 m/s 的三维稳定行走。被动行走机器人在能量效率上具有很大优势,其 COT可以达到 0.19,行走步态更接近人的自然行走;但它也存在明显的缺陷,比如抗扰动能力很弱,一般只能按照预先设定好的速度和步长进行运动,难以适应障碍、崎岖路面、上下台阶等复杂运动。
(2) 运动优化方面:2010 年,韩国工业技术研究院机器人应用研究所 Kim 等人[36]研制的四足机器人,通过改变原有的固定足端接触角的轨迹规划方法,将足端与地面的夹角规划成以三角函数规律波动的曲线,从而减小了机器人各个关节的整体摆动幅度,减小了能耗。2012 年,英国爱丁堡大学Braun 等人[37]通过应用非运动学(nonkinematic)控制方法,实现双足机器人的“脚跟先着地”放松(relaxed)式行走,提高了机器人的能效和协调性。
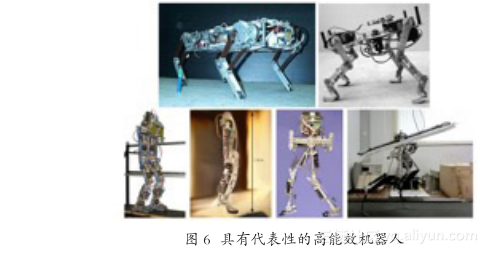
(3) 弹性或柔性机构方面:2008 年,瑞士洛桑联邦理工学院的仿生机器人团队设计了四足机器人Cheetah [38] ,该机器人腿部的踝关节是被动驱动,只通过橡胶带约束。橡胶带可以吸收冲击并储存能量,既提高了运动速度又有利于降低能耗。2014 年,韩国科学技术高级研究院(KAIST)开发了双足机器人 Raptor [39] ,每只脚都只有一个电机,腿部使用轻质量的复合材料,和地面接触的脚部使用了韧性极佳的碳纤维,该材料的弹性让 Raptor 更加机动。另外,Raptor 的“跟腱”由高弹性的弹簧构成,这让 Raptor 在完成跳跃的同时能耗依然较低。其在跑步机上最高速度达到 46 km/h,成为迄今为止速度最快的平面双足机器人。
(4) 弹性或柔性驱动方面:1998 年,日本早稻田大学 Yamaguchi 等人[40]在双足机器人 WL-14上引入拮抗式驱动(Antagonistic Driven)的变刚度关节,使得机器人腿部在摆动过程中表现出被动动力学特性,摆动腿能耗减少了 25%。2006 年,比利时布鲁塞尔自由大学 Vanderborght 等人[41]研制的双足机器人Lucy,使用气动人工肌肉作为驱动,根据期望的关节轨迹调整人工肌肉的刚度,使机器人肢体的固有频率域接近期望轨迹的频率,达到提高能效的目标。2011 年,西班牙马德里理工大学的 Garcia 等人[42] ,模仿马的后腿结构,研制了一款机器人腿结构 HandLeg。关节采用弹性驱动器驱动,膝关节的旋转轴上装有磁流变阻尼器。采用直接的力控制和主动阻抗控制,提高了机器人与环境接触的柔顺性,同时通过膝关节的主动阻尼器的制动,减少了克服小腿摆动惯量所需要的能耗。2012年,德国达姆施塔特工业大学的 Radkhah 等人[43]模拟人类的腿部结构,研制了肌腱驱动的双足机器人 BioBiped1。腿部由四个关节组成,两个髋关节、一个膝关节和一个踝关节,整个运动借助于弹簧和电机,与人类肌肉和肌腱驱动十分相似,可以在行走时消耗更少的功率。如图 6 所示。
以上从不同角度研究了提高能效的方法和手段。但总体来讲,现有研究未能综合考虑运动的能效性、快速性和稳定性,在弹性或柔性机构与驱动方面的研究处于起步阶段,尚未建立系统有效的理论架构与方法。